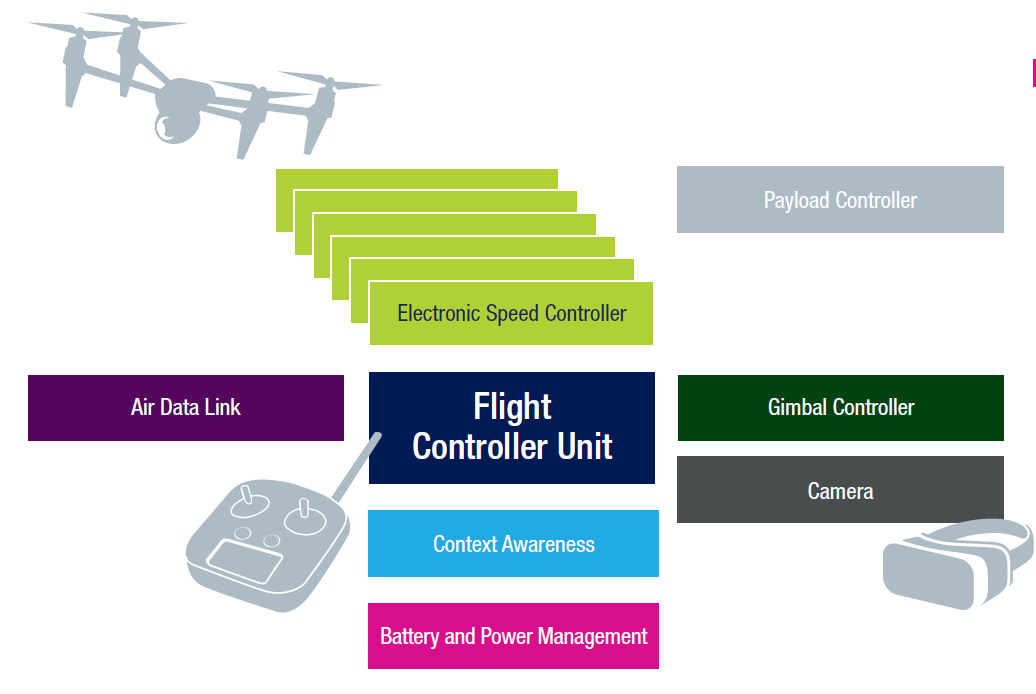
- 無人機技術非常有趣,因為它涉及最先進的設計原則: 平衡飛行時間,尺寸和重量,穩定性,系統復雜性,邏輯,特殊功能和關鍵安全著陸等演習。無人機制造商通常需要開發以下不同的子系統來生產可行的最終產品:?飛行控制器單元(FCU),用于管理不同條件下的飛行,依賴其慣性測量單元(IMU)用于穩定無人機懸停。在專業無人機中,FCU嵌入了GPS(全球定位系統)形成自動駕駛系統。?幾乎四個電子速度控制器(ESC)用于控制電動機的復雜性算法,允許高轉速,同時延長電池壽命。?攝像機穩定器,通過伺服電機旋轉和穩定攝像機
- 關鍵字:
STM32F303 L63982 無人機 速度控制
stm32f303介紹
您好,目前還沒有人創建詞條stm32f303!
歡迎您創建該詞條,闡述對stm32f303的理解,并與今后在此搜索stm32f303的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473