控制器局域網 (CAN) 總線的工作方式

現實中,如果兩個人同時說話,怎樣來決定誰先說呢?有時候是嗓門最大的先說,而這基本上也是控制器局域網(CAN)總線的工作方式。
本文引用地址:http://www.j9360.com/article/201609/303957.htm在一條CAN總線中,所有收發器發出消息的優先級(從最低有效位(LSB)到最高有效位(MSB));最高優先級的消息將被發送。特別是對于CAN來說,如果兩個收發器同時發送,他們都“張開嘴”說一個“0”(邏輯高電平);數值越低,這條消息的重要性越高。換句話說,如果兩個收發器都在“喊”,首先“閉嘴”的收發器必須等到另外一個收發器完成發送之后才能說話。整個過程被稱為仲裁,更確切的說是非破壞性仲裁。
在設計通信系統時,你可以隨意使用很多穩健的語言。其中的一些表達方式比較成熟并且意思明確,而其他的語言仍舊在不斷的發展中,比如說CAN總線。CAN 是一款非常穩健的差分信令通信協議。這款協議最初設計用于汽車應用,在無需主機控制器的情況下,實現微控制器、傳感器或集成電路之間的通信。
CAN的工作原理也是其非常穩健的一個原因。他的差分信令拓撲結構使其能夠輕松應對耦合噪聲。在出現由接地層噪聲導致的位移時,這一特性可以使傳輸線路,CANL和CANH保持在一起。與其他差分協議不同的是,當CAN處于接收狀態(一個邏輯1)時,兩條線路都將處于同樣電壓,通常為VCC/2(除非是一款3V CAN總線收發器,那樣的話就是完全另外一種對話方式了)。當CAN線路被分別驅動時,這成為主導狀態和一個邏輯0。將CANL和CANH想象為一張嘴的兩片嘴唇:L是下嘴唇,而H是上嘴唇。當你想說話時,你告訴自己分開你的嘴唇并張開嘴。這是一個低電平有效邏輯信令,其中“0”在你開口說話時置位。當你不在說話時,你的嘴唇緊閉,CANH和CANL線路一起處于VCC/2電平上。
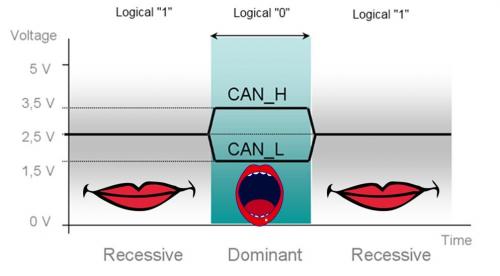
圖1:CAN信令和邏輯電平
除了這些基本原理之外,CAN總線也在不斷的發展中。全新調整和增強功能正在使這項技術更加高效,并且釋放出全新的性能水平。其中一個最新進展是對于靈活數據速率的思考,或稱為FD。這是關于“CAN”語言表達方式的一課。您可以在之前的博文中找到更多與CAN FD和我們的產品相關的內容,“對于更高速的需要:CAN FD。”。













評論