基于CAN現場總線技術的機艙報警系統

1 CAN總線概述
本文引用地址:http://www.j9360.com/article/201609/303792.htmCAN (Controller Area Network) ,即控制局域網,是 一種具有高可靠性、支持分布式和實時控制的串行通 信網絡。CAN為多主方式工作,網絡上任意節點均可 在任意時刻主動地向網絡上其他節點發送信息,而不 分主從,且無需站地址等節點信息,通信靈活。CAN 協議模型結構只有3層,即只取OSI模型底層的物理 層、數據鏈路層和頂層的應用層。物理層使用雙絞線, 數據鏈路層采用了具有優先級控制的載波偵聽及沖突 檢驗機制(CSMA /CD) 。CAN 的最大特點是可靠性 高,其節點在錯誤嚴重的情況下具有自動關閉總線的 功能,切斷與總線的聯系,使總線上其他操作不受影 響。CAN總線的速率在40m內可達1Mbit/ s,最大傳 輸距離為10km,最大傳輸距離時的速率可達5kbit/ s。 每條CAN總線可掛接設備數最多可達110個,多條連 用時,容量基本不受限制。
2 CAN總線在船舶中的應用
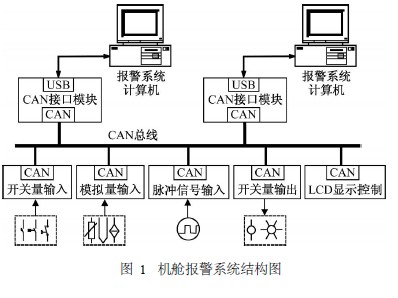
目前, CAN總線應用于船舶的基本網絡模型如圖 1所示。
模型中網絡分為2層結構,分別為上層網和下層 網(子網) ,子網通過網橋與上層網相連接。采用這種 結構,網絡中節點數理論上可以達到1000個,大大擴 充了CAN網絡容量,完全可以滿足船舶監控系統的需 要。
因為CAN協議本身沒有考慮冗余的結構,所以各 CAN系統自行設計了冗余方案,其中常見的做法有2 種:一種是子網中每個CAN節點都有2個CAN通信 模塊,同時鋪設2路總線,當一路總線出現故障時,自 動啟用備用總線通信;另一種是每個子網采用環形拓 撲結構,實現方法是只在CAN網橋與子網連接的一端 保留2個CAN通信模塊(主干網可采用類似的方法) , 分別接子網總線的兩端,構成環形,這樣每個節點可以 在兩個方向上與其他節點通信,某一處總線斷開不影 響系統正常工作。
3 CAN通信模塊的設計
下面結合所開發的模塊實例,簡要介紹以CAN通 信模塊開發的一般方法及軟硬件問題的解決。
3. 1 下位節點的設計
本例中CAN網絡節點的結構如圖2所示。
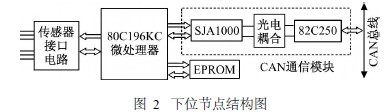
其中, 80C196KC是Intel 16 位微控制器,內置有 16K ROM, 488B寄存器RAM,A /D轉換器,看門狗定時 器等。其工作頻率可達20MHz,適用于實時控制系統。 SJA1000是新型的CAN 獨立通信控制器, 支持 CAN2. 0A和2. 0B兩種規范,可完成物理層和數據鏈路 層的所有功能。通信波特率最高可達1Mbit/ s。另外, PeliCAN擴展了很多新功能,包括:可讀/寫訪問的錯 誤計數器;可編程的錯誤報警限值;最近一次錯誤代碼 寄存器;具體控制位控制的位仲裁丟失;單次發送(失 敗后無重發) ;支持熱插拔等。
82C250是CAN控制器與物理總線之間的接口部 件,可完成對總線的差動發送和接收功能。82C250與 ISO /D IS 11898標準完全兼容,具有抗瞬間干擾、降低 射頻干擾、熱保護、總線與電源及地之間的短路保護等 能力,可支持多達110個節點相連。
本例中, 程序固化在EPROM 中, 80C196KC 與 SJA1000分別使用各自的外接晶振,傳感器信號經過 采集電路處理后,接入80C196KC的A /D引腳。本系 統中, CAN總線通信波特率為100kbit/ s,數據采集模 塊每隔0. 5 s向網絡發送一次數據。
3. 2 CAN網橋
CAN網橋的結構如圖3所示。CAN的數據幀內 容由其頭部的11位(CAN2. 0A)或者29位(CAN2. 0B) 標志符命名。標志符可用于描述數據含義,每個接收 器通過對標志符的選擇濾波確定此幀。網橋有2 個 CAN通信控制器背對背相接而成,每個通信控制器根 據所收到的數據幀的某2個標志位判斷是否需要將其 向其他子網轉發。
3. 3 CAN - PC接口卡
PC機與CAN 網絡的連接卡有2 種, 即內置式 卡———插在PC機的擴展插槽中,和外置式卡———與 PC機串口相連。當然,目前市場上已經可以買到此類 產品,不過,通常價格較高,而且,對于用戶所要搭建的 具體系統,不一定完全適用。因此,用戶完全可以根據 自己的要求,開發自己的轉接卡部件。

評論