詳解基于CAN總線的汽車儀表系統設計―硬件系統方案

系統整體方案設計
本文引用地址:http://www.j9360.com/article/201609/303536.htm3.1系統的設計原則
一個應用系統開發方案的好壞,和開發者對系統本身的了解程度有密切的關系,當還不完全了解系統需求的時候,就開始進行開發工作是盲目的和不切合實際的。當代汽車對工況信息的顯示要求越來越高,要求汽車組合儀表提供信息量大,顯示直觀、清晰、穩定,而且要求響應速度快,顯示精度高哪]。本課題根據汽車電氣設備基本技術條件和汽車儀表基本技術條件,同時結合系統的設計思路和方案,提出了以下設計原則:
(l)作為駕駛員與車輛進行信息交流的界面要簡潔和直接方便,使駕駛員在不需要分神的情況下能很方便地了解相關信息。
(2)系統必須能夠及時準確地提供大量的信息,要求顯示信息速度快,部分信號要求實時反映。
(3)必須滿足汽車儀表的基本技術條件。在交通現狀復雜的情況下,面對路途顛簸、冰雪、酷暑和高原,保證系統在環境變化方面有較高的可靠性和穩定性。
(4)在電子技術快速發展的時代,預留軟硬件后續發展空間。防止系統在功能設計變化微小時,而對設計電路和程序做很大的修改與調整。
(5)系統要有良好的經濟性與實用性,以市場需求作為產品開發的導向。界面要滿足駕駛舒適性,設計的儀表板在車內部有美化作用。
3.2系統的功能需求分析
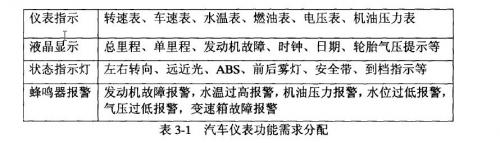
汽車組合儀表不作為信號的發生單元向外部發出信息,只根據人們對汽車儀表的信息顯示的需求,將分布在汽車車身上的各部件信號傳輸到儀表上,實時反映汽車各部件當前的工作狀態,使駕駛員能及時準確的了解汽車當前的狀態,從而保證汽車可靠安全的行駛的重任。同時還作為中繼站,將傳感器直接傳遞過來的信息經過 MCU通過CAN總線傳遞給其他電控單元。本儀表開發工作首先從外圍功能需求分析入手,從而構架出系統功能結構圖,再從功能結構圖進行對功能模塊的設計,根據功能模塊選擇合適的MCU和外圍電子元器件,最后根據各電器元件特征進行程序軟件的開發與調試。本課題所研究的汽車組合儀表主要實現的功能有:
注:在功能指示燈中,按照汽車操縱件信號裝置的標志(GB4094一1999)劃分為三種顏色,分別為綠色:正常運行指示;黃色:警告標志;紅色:危險報警標志.
3.3系統技術方案
根據表3一l的功能設計分析,首先,儀表要作為CAN網絡上的一個節點,接收來自CAN網絡上發動機、變速箱、ABS等節點傳輸的信息,還要完成以下參數的采集工作任務 ,具體有:發動機轉速與車速的脈沖信號,電壓表、燃油表、輪胎氣壓的模擬信號(其中的水溫表和機油壓力表是發動機的ECU通過CAN總線傳遞信號)。同時單片機還要完成時鐘顯示和按鍵調節、儀表板背光亮度調節、當前里程清零等動能。部分狀態指示燈的開關信號和傳感器的信號在本儀表總成中并沒有通過單片機來進行控制,而采用直接由外部電器開關和傳感部件對其狀態進行控制 。單片機對不同的信號對應有著各自的特征和處理要求,具體如表3一2所示:
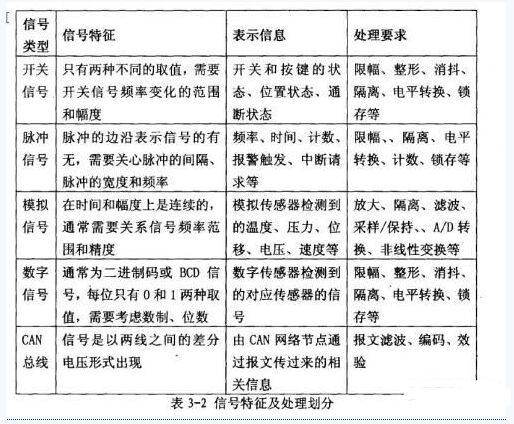
根據表3-2中的信號分類,結合表3一1的功能需求分析及單片機本身的特性可將本儀表系統劃分為以下的功能模塊:
1、電源調節模塊:儀表系統使用24V電系電源,允許電源的短期波動范圍在12V~32V之間。各功能指示燈(LED)、LCD、蜂鳴器等需12V電源,MCU、EEPROM等需sv電源。電源電壓調整模塊保證各元器件的工作電壓穩定,具體設計見4.1節。
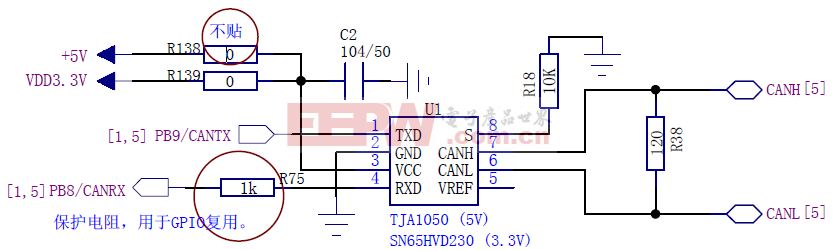
2、CAN通信接口模塊1201:實現CAN控制器的功能,支持CAN2.OA、B通信協議,通信速率為25OKb,能夠接收多種標識符的CAN總線數據包,能在車輛內電磁干擾(EMC)的環境下可靠工作,能夠通過編程測試CAN模塊的正常使用。
3、脈沖信號調節模塊與周D轉換調節模塊1211:轉速與車速信號屬于脈沖信號,由于車速〔或發動機轉速)傳感器輸出的信號不是標準方波信號,而且往往還附加了許多的干擾信號,這就要對信號進行預處理,去除其中的干擾信號,并把信號過濾、整形為標準的方波信號輸入給MCU。而燃油、電壓、輪胎氣壓屬于O一 SV的標準模擬信號,車載電源電壓為24V,通常情況下需要電阻對其進行分壓后傳送給MCU。
4、開關信號接口:直接由外部開關位置或傳感器信號反應出汽車的工作狀態,根據標志GB4094一1999的要求陣〕,汽車各部件的工作狀態可分為3種顏色:紅、黃、綠。當汽車對應部件出現信號時,即高亮顯示提示駕駛員當前的操作和應注意的問題。
5、信息顯示模塊:包括步進電機驅動儀表信息和液晶屏顯示信息。步進電機儀表指針的顯示結構可以由液晶屏的顯示功能來完成,會使整個儀表的結構更加緊湊,但指針模擬的指示結構更加直觀與明確,己被廣大駕駛員普遍接受并認同,在卡車、貨車和公共汽車中一般使用儀表結構顯示。液晶屏的顯示功能更強大,操作也比較復雜,一般在高檔轎車中比較流行使用液晶顯示結構,這也是現代汽車向舒適化和人性化發展的一個方向。
6,蜂鳴器報警模塊:當汽車各部件運行狀態超過其額定值后,信息反饋給MCU,由MCU發出信號驅動蜂鳴器,同時對應的故障燈閃爍。
7、護PRoM模塊:系統采用了電擦除可編程的只讀EZPROM來保存需要永久記憶的數據和固定時刻內的歷史數據等,并且加入了“看門狗”電路來監視MCU的工作。從整體結構上看,系統硬件各功能模塊之間的結合就構成了整個儀表的硬件系統,其系統框圖如圖3一1所示。
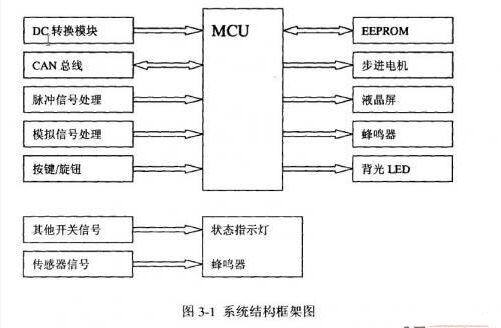
本方案首先根據整個系統的功能需求分析,確定相應的信號處理模塊。在信號傳輸過程中除了CAN總線信號,也存在開關信號、模擬信號、數字信號等。然后根據所要求的信號處理功能,進行選擇合適的單片機處理模塊。通過對各種型號單片機的性能和價格的比較,本系統最終選擇了Freescale公司(原 motorola半導體產品部,于2004年獨立出來)的16位帶CAN接口的單片機MC9512H128作為儀表的核心MCU。本系統選用國家半導體公司)的開關電源穩壓轉換器LM2574一5.0作為電壓調整模塊,對整個系統電源提供可靠的電源。采用PhiliPs公司的Al040為高速CAN總線收發器,通過CAIH和CAIL接收和發送相關信息;選用XICOR公司的X5045作為看門狗定時器、EEPROM和電源監測芯片。同時結合 MC9s12H128高度的集成特性,輔以脈沖信號濾波、放大、整形電路,LCD顯示電路,步進電機和相關的外圍電路,即可設計出的小型單片機數據采集系統。不僅能完成數據采集的功能,而且能實時驅動步進電機和液晶屏進行數據的顯示,準確及時的反映相關信息。












評論