工業4.0革命對自動化的重大影響

體系結構
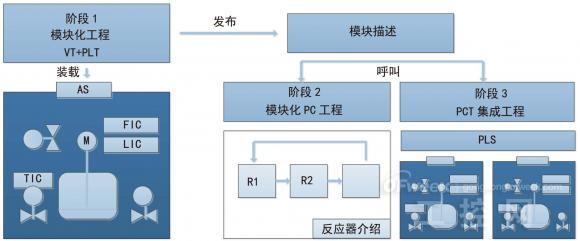
本文引用地址:http://www.j9360.com/article/201607/293900.htmNE148標準給出了自動化技術的體系結構,該體系結構提出了兩種模塊并闡述了它們同PCS之間的連接關系。第一個模塊是變量A,通過控制單元自動處理模塊邏輯工作,且只和PCS交換必要信息。第二個模塊是變量B,該模塊僅使用I/O部件。
功能
由于自動化技術的功能需要無縫地集成到PCS中,模塊之間也需要建立通信連接,自動化技術自身的功能非常重要。模塊和模塊之間,模塊和PCS之間的通信可以通過IEC-Ethernet協議或現場總線協議解決。
基于狀態控制功能,是基于模塊的狀態描述和操作模式來實現的。在整個系統中每個模塊的狀態描述可以公開訪問,并且模塊之間邏輯連接的接口是唯一的。“基于狀態控制”功能對應ISA106標準的連續生產工序和ISA88標準的批量生產工序,適用于上述兩個標準。
垂直通信/集成功能,是指模塊和PCS之間的通信,模塊必須集成到PCS環境中才能通信,通信可以通過IEC-Ethernet 協議或現場總線來實現,每個模塊的狀態模型都由PCS控制。變量A模塊使用OPC-UA交互界面,通過現場總線和PCS交換信息。狀態模型的建模,由于通信是在模塊和PCS間進行,狀態模型可以從當前的狀態中建模,有兩種建模方法。其一是使用拓展因果矩陣進行SFC(產品流程控制)建模。
SFC可以映射到拓展因果矩陣中,SFC已經是狀態模型,或者可以自動轉換到狀態模型,這些狀態模型無需進一步的操作就可以直接應用到控制單元上,這種方法較適用于變量B模塊;其二是使用現有的編輯器,可以用傳統方式進行SFC建模,這種方法較適用于變量A模塊。
人機交互
操作界面
除了滿足自動化技術的功能之外,操作界面有如下需求,能夠人工手動控制個別模塊,能夠及時將圖表集中顯示在操作端顯示屏上。
與控制系統的半集成
在半集成的情況下,模塊的人機界面水平在1-3級之間。在控制系統中,界面顯示相關的警告、變量等,以便模塊的圖形化表示。在高水平的控制系統中,圖形化顯示確保了表示的一致性。4級和5級(6級除外)也可通過人工實現,6級能否實現取決于具體情況。模塊制造商應該盡量避免人機交互界面邏輯和控制器設計兩者之間的高關聯性。模塊設計應當包括所有的數據,以便更高一級的控制系統可以在運行時得到相應的模塊信息。
與控制系統的完全集成
與半集成相比,完全集成試圖將4級和5級實現自動化。為此,每個模塊必須提供4級和5級描述,有兩種方法可以實現。一是模塊來描述自身的實際圖表情況。模塊的操作圖表以不依賴制造商且獨立的方式給出。自動化技術系統通常使用特定系統表述方法來描述操作圖表,并提供專有格式。例如HTML5是一種不依賴制造商的格式,是W3C發布的一種在IT行業中的開放性語言,沒有相關操作顯示的知識就可以集成。如果還需要可擴展的圖形,就可以鑲嵌到HTML5代碼中作為可縮放矢量圖形(SVGs)。更高級別的控制系統必須支持該技術的曾用技術(如ActiveX等)。這些技術的優勢是可以得到并且已廣泛使用,但缺點有二。
(可視化數據的層次分級)
一是不能保證描述的一致性;
二是模塊提供自身的描述方法。
而圖表由高一級控制系統來給出,這樣能確保描述的一致性。但是這種情況下,模塊制造商并不能看到最終的模塊描述版本,也就導致不同的控制系統,其描述也不盡相同。
人機交互界面實現完全集成需要模塊達到5級標準,需要從更高一級控制系統的模塊描述中得到商業邏輯的技術。如果模塊完整的人機交互商業邏輯包含在描述之中,模塊便會達到6級集成。在半集成和全集成間的折衷方法就是對于操作界面使用半集成,而對于詳細的診斷性信息使用完全集成,采用上述方法,能簡化控制系統中必要的標準化和實施過程。
(過程(控制)技術工程化)





評論