基于現場總線WWT型PLC水輪機微機調速器的設計

一、WWT微機調速器的數學模型
本文引用地址:http://www.j9360.com/article/200793.htm1.1控制規律的選擇
水輪機調節設備是通過調節導水機構的開度來調節水輪機的流量及其流態的,這種調節需很大的推力,所以調速器的執行機構采用一級放大或二級放大的油壓裝置,從而利用其推力推動接力器來實現。
從自動控制原理的角度上講,控制水輪機流量存在著水輪慣性,對調節系統的動態穩定和響應特性帶來不利影響,水輪調速系統是一個復雜的、多變的、非線性的控制系統。
水輪機調速器由測量元件、放大校正元件、給定元件、執行機構、反饋元件等組成,發電機組作為構成閉環控制系統。它的控制過程是測量元件把機組轉速n(頻率)或其他被調參數測量出來,與給定信號和反饋信號綜合后,經放大校正元件去控制水輪機組,同時反饋元件又把導葉開度變化的信號返回給加法器。
1.3 PID調節的控制算法
上面說到水輪調節系統是一個復雜的控制系統,因此選擇合適的控制規律是一個號的控制系統的關鍵因素之一。在設計WWT型微機調速器時我們選擇了PID調節規律,它的結構簡單,并且提高控制系統的穩定性和可靠性。
PID控制規律在實際中是由PLC的 軟件程序來實現的,PID的輸入為測量的頻差,其運算結果YPID為對應的導葉開度Y的數字量,YPID送入交流伺服電機驅動器,以控制電機的運轉位置,電機的轉動位置通過電液轉換器對應導葉接力器的開到對應的開度Y。
為實現有差調節,調差的反饋信號可取自位置環控制式PID運算結果,并與 功率給定信號的數字調節量相減,然后經Bp后與頻差信號綜合,改綜合信號送入PID調節通道。
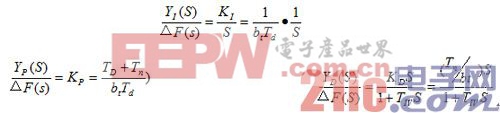
PID微機調節器的控制算法為:

將上式進行拉氏變換得:

式中負號表示正的頻差對應負的接力器的開度。
式中是PID調節的時間連續的傳遞函數表達式;若用PLC程序實現則必須進行離散計算。
將式中的比例、積分、微分單獨的表達式寫出來:
用PLC程序來實現則必須進行PID調節計算,而采樣周期t式離散計算過程中極為重要的量。WWT型微機調速器是以種借助程序實現調節和控制功能的數字電子裝置,它是以巡回掃描的或定時處理的原理工作的。PLC完整的執行一次可編程器系統、用戶程序所占用的 時間為采樣周期。
二、WWT微機調速器的數學控制方案的設計
2.1 WWT型PLC微機調速器系統原理
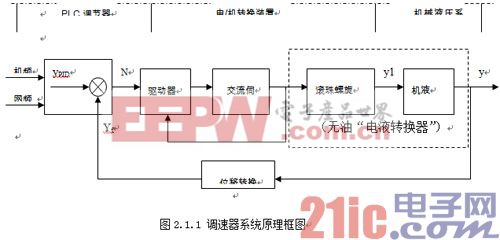
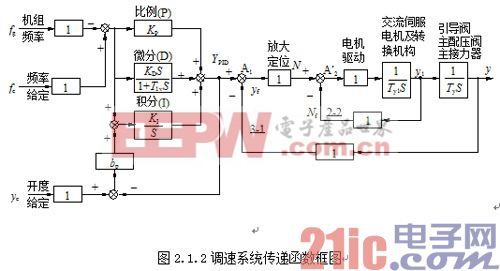
由交流伺服電機(位置環)及滾珠螺旋自動復中裝置構成電液轉換器,由定位環控制PLC微機調節器的定位模塊,根據PID調節器輸出YPID與主接力器反饋(通道3-1)yf的差值,向交流伺服電機驅動器送出與此差值成比例的有方向的定位信號N,交流伺服電機同軸的旋轉編碼器將實際轉角(位移)y1以脈沖數的形式Nf送回驅動器,從而形成了以Ty1(交流伺服機構反應時間常數)為特征參數的小閉環。在調速器穩定狀態(靜態),y1使主配壓閥處于中間平衡位置。
YPID至y的傳遞函數為:
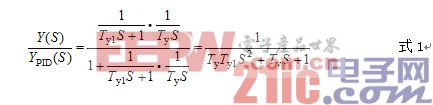
由于交流伺服電機具有很高的頻率響應特性,其反應時間常數可以忽略(取Ty1=0)不計,上式傳遞函數簡化為

2.2 PLC系統結構
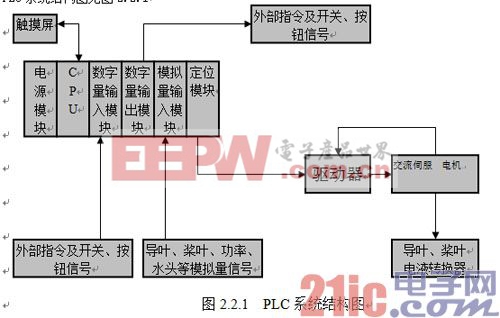
在調速器電氣部分的控制核心的PLC系統包括CPU模塊,數字量輸入模塊,數字量輸出模塊,模擬量輸入模塊,定位模塊、觸摸屏等。PLC系統采集現場數據,進行PID運算及狀態控制,輸出控制信號。

伺服電機相關文章:伺服電機工作原理






評論