車用LED照明技術及現狀分析

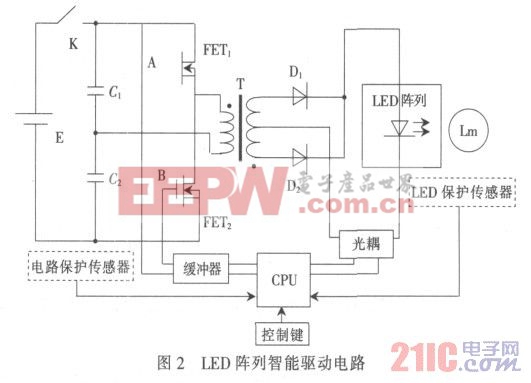
目前車用LED 驅動器一般采用兩種方法控制正向電流。(1) 采用LED 的V-I 曲線確定產生預期正向電流所需要向LED 施加的電壓。其缺點為:LED 正向電壓的任何變化都會導致LED 電流的變化, 其中的鎮流電阻的壓降和功耗會浪費功率和降低電池使用壽命。(2) 利用恒流源來驅動LED。因為此方法需要將LED 并聯在電路中, 而驅動并聯LED 需要在每個LED 串中放置一個鎮流電阻, 這會導致效率降低和電流失配。因此, 這兩種方法都不能充分體現LED 應有的優越性。為了克服現有車用LED 驅動器的缺點, 出現了車用LED 陣列的高效智能驅動方法。該方法采用了半橋式DC-DC 變換技術、全波整流技術、光電耦合技術等, 確保了整個驅動電路的工作效率; 提出了基于嵌入式系統的智能控制方案, 此方案采用智能PWM 穩流控制和調光控制, 具有負載開路/短路保護和過流過壓保護功能。圖2 為LED陣列智能驅動實驗電路。 如圖2 所示,CPU 輸出兩路完全倒相對稱的PWM信號A、B, 分別作用在開關器件上, 使其輪流導通; 通過高頻變壓器T 將能量耦合到次級, 再經快恢復二極管D1、D2 進行全波整流, 以實現對LED 陣列的驅動。LED陣列驅動回路的光電耦合器, 完成對LED 陣列驅動電流的監測, 并反饋到CPU, 形成一種智能電流負反饋的閉環控制系統, 以確保驅動電流的穩定的可靠性。 車用LED 驅動電路的集成化和智能化程度越來越高。類似PMU( 電源管理單元)的芯片及封裝的小型化將逐漸取代多個單一功能電路進行組合的方法, 以適應板級空間非常有限的車載應用。同時, 由于單片機、DSP 等控制芯片以及嵌入式技術的不斷發展, 可通過軟件技術實現車用照明系統的自動化, 這樣LED 的恒流驅動精度以及亮度的自動調節會更加準確。智能化控制已經成為新一代車用LED 驅動器的設計理念。 3 汽車LED 前照燈 由于汽車前照燈在行車安全中具有重要的作用, 因此LED 前照燈是最難也是最后投入使用的。以前,LED前照燈只應用在概念車上, 隨著LED 照明技術以及汽車產業的不斷發展,LED 前照燈的應用范圍已從概念車、豪華車向中檔車甚至一般車型過渡, 并且照明發光強度已達到白熾燈的水平。 汽車前照燈包括遠光燈和近光燈。在夜間行駛時,遠光燈應保證照亮車前100 m、高2 m 處范圍內的物體, 且亮度均勻; 近光燈不但要保證車前40 m 司機能看清障礙物, 而且不能讓迎面而來的駕駛員或行人產生眩光, 以確保汽車在夜間交會車行駛時的安全。 傳統汽車前照燈輸出近光和遠光兩種功能的光束,且每種光束分布模式均呈靜態分布, 具體的光照分布也都符合國家標準。但在實際應用中, 此系統射出的光束分布于有限的角度范圍, 在一些較為復雜的路況下( 如轉彎) 極易產生視覺盲區。另外, 傳統汽車前照明系統不具備自動調整光束分布的功能, 近光光束和遠光光束之間的變換需駕駛員手動操作實現, 這樣在來往車輛頻繁的行車環境下, 車輛之間容易產生眩目光。為了克服傳統汽車前照燈的上述缺點, 自適應前照系統AFS 應運而生。 AFS 是一種能使駕駛員更好地適應各種速度、道路類型和天氣條件的變化, 提高駕駛安全性的前照燈系統。其工作原理如下: 當汽車進入特殊的道路狀況(如彎道) 時, 由于方向盤和速度發生變化, 角度傳感器和速度傳感器傳輸到電控單元(ECU) 的信號就相應發生了變化。ECU 捕捉到這些信號變化, 同時判斷車輛進入了哪種彎道, 并發出相應的指令給前照燈的控制單元, 控制單元根據收到的指令操控裝在AFS 燈體內部的微電機帶動發光三要素繞相應的旋轉軸旋轉, 從而在非常規路面及天氣下行駛時, 改變照明方式, 提供更好的安全保障。 隨著白光LED 技術的發展及空氣動力學和汽車造型的需求, 汽車前部位置越來越低且呈流線型, 為前照燈預留的空間越來越小。為了滿足汽車照明智能化和人性化的需求,AFS 與LED 燈的結合已經成為現代汽車前照燈的發展趨勢。









評論