MEMS醫療運動檢測系統挑戰研究

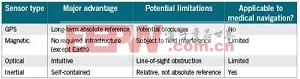
慣性傳感器在工業中用作輔助導航器件已經相當廣泛。通常,慣性傳感器與GPS等其他導航設備一起使用。當GPS訪問不可靠時,慣性導航可以利用所謂航位推算技術來彌補空隙。除了最簡單的導航之外,多數解決方案都會依賴多種類型的傳感器,在所有條件下提供所需的精度和性能。GPS、光學和磁性檢測技術已廣為認知,相關產品也很豐富。然而,每種技術都有其不足之處,即使一起使用,互相之間也不能完全補償彼此的不精確性。MEMS慣性傳感器則有可能完全補償傳感器的不精確性,因為它不存在上述干擾,并且不需要外部基礎結構:無需衛星、磁場或相機,只需慣性。表2列出了主要的導航傳感器技術及其優缺點。
表2 廣泛應用的導航傳感器及其對醫療導航的適用性
就像車輛導航設備會發生GPS遮擋問題一樣,醫療系統所用的光學導航技術也會遇到視線遮擋問題。發生光學遮擋時,慣性傳感器可以執行航位推算,從而通過冗余檢測增強系統的可靠性。
2.3 醫療導航
符合表2所列原則的一個醫療應用是在手術室使用慣性傳感器,使人工膝關節或髖關節能夠與病人獨特的骨骼結構更精確地對準。本例的目標是讓植入體與患者自然軸的對準誤差小于1°。95%以上的全膝關節置換(TKA)手術采用機械對準方法,它所產生的典型誤差為3°或更大。使用光學對準的計算機輔助方法已經開始取代一些機械程序,但可能由于設備開銷較大,推廣過程緩慢。無論使用機械對準還是光學對準,這些手術中大約30%都會有未對準的情況(定義為3°以上的誤差),使病人感覺不舒服,常常需要進行額外的手術。降低對準誤差的可能好處包括:縮短手術時間、增強病人舒適感以及使關節置換效果更持久。
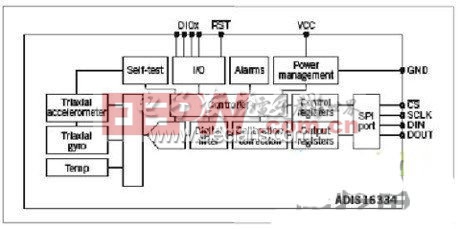
圖2 基于MEMS的慣性測量單元提供6自由度運動測量, 結構緊湊,適合用于手術儀器
完整多軸慣性測量單元(IMU)形式的慣性傳感器已證明能夠顯著提高TKA手術的精度。ADIS16334(圖2)等器件包含所需的全部檢測功能--三個線性傳感器和三個旋轉傳感器,可取代基于機械和光學的對準技術。該器件利用多種類型的傳感器和嵌入式處理來動態校正傳感器漂移,如陀螺儀的線性加速度偏移、線性和旋轉檢測的溫度漂移等。通過標準4線串行外設接口(SPI),可以與這個相對復雜的精密傳感器套件輕松接口。
MEMS慣性傳感器可靠度高(汽車行業20年的應用歷史證明了這一點),它在手機和視頻游戲中的成功應用說明它在商業上極具吸引力。然而,不同應用對性能的要求大不相同,適合游戲的器件并不能解決本文所述的高性能導航問題。對于導航,重要的MEMS性能指標是偏置漂移、振動影響、靈敏度和噪聲。精密工業和醫療導航所需的性能水平通常比消費電子設備所用MEMS傳感器的性能水平高出一個數量級。表3列出了有助于傳感器選型的一般系統考慮。
表3 系統目標/約束條件有助于傳感器選型
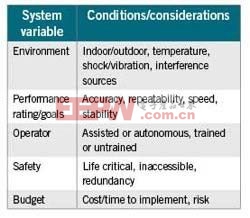
大多數系統都會集成某種形式的卡爾曼濾波器,以便有效合并多種類型的傳感器。卡爾曼濾波器將系統動力學模型、傳感器相對精度和其他特定應用的控制輸入納入考慮,有效確定最切合實際的運動情況。高精度慣性傳感器(低噪聲、低漂移、相對溫度/時間/振動/電源變化保持穩定)可以降低卡爾曼濾波器的復雜度,減少所需冗余傳感器的數量,以及減少對容許系統工作方案的限制條件數量。
3 醫療MEMS的復雜性
雖然傳感器已實現各種各樣的醫療應用,從相對簡單的運動捕捉到復雜的運動分析,但醫用傳感器的高性能要求提出了復雜且涉及到大量計算的設計挑戰。幸運的是,解決這些新一代醫療挑戰所需的許多原理均基于經工業導航應用驗證的方法,包括傳感器融合和處理技術。在醫療導航領域,運動的復雜性以及精度和可靠性要求將推動多處理器、附加傳感器后處理、復雜算法、復雜測試和補償方案的發展。







評論