基于XC164CM的汽車電動助力轉向系統

前言
本文引用地址:http://www.j9360.com/article/197910.htm近年來, 動力轉向系統已成為一些轎車的標準設置,全世界約有一半的轎車采用動力轉向。隨著汽車電子技術的發展,目前一些轎車已經使用電動助力轉向系統(EPS),使汽車的經濟性、動力性和機動性都有所提高。EPS利用電動機產生的動力協助駕車者進行動力轉向, 一般是由轉矩(轉向)傳感器、電子控制單元、電動機、減速器、機械轉向器、以及蓄電池電源所構成。汽車在轉向時,轉矩(轉向)傳感器會感覺到轉向盤的力矩和轉動的方向,這些信號會通過數據總線發給電子控制單元,電控單元會根據傳動力矩、擬轉的方向等數據信號,向電動機控制器發出動作指令,從而電動機就會根據具體的需要輸出相應大小的轉動力矩,從而產生了助力轉向。如果不轉向,則本套系統就不工作,處于休眠狀態。由于電動助力轉向的工作特性,駕車者會覺得方向感更好,高速時更穩不發飄。又由于它不轉向時不工作,而且只需電力不用液壓,與傳統動力轉向系統在各種行駛條件下均可節能80%左右,提高了汽車的運行性能。在近年得到迅速的推廣,也是今后助力轉向系統的發展方向。
圖1所示為一個典型的電動助力轉向系統,其核心是一個電動機變頻調速系統。由于永磁同步電動機(PMSM)具有結構簡單、體積小、重量輕、損耗小、效率高等特點,和直流電機相比,它沒有機械換向器和電刷、與異步電動機相比,它不需要無功勵磁電流,因而功率因數高,體積小,電流和定子電阻損耗小,且轉子參數可測、定轉子氣隙大、控制性能好,是汽車電動助力轉向系統的首選。

永磁同步電動機的矢量控制一般通過檢測或估計電機轉子磁通的位置及幅值來控制定子電流或電壓,這樣,電機的轉矩便只和磁通、電流有關,與直流電機的控制方法相似,可以得到很高的控制性能。對于永磁同步電機,轉子磁通位置與轉子機械位置相同,這樣通過檢測轉子的實際位置就可以得知電機轉子的磁通位置,從而使永磁同步電機的矢量控制比起異步電機的矢量控制有所簡化。在要求高精度,高動態性能以及小體積的場合,應用PMSM電機伺服系統具有明顯優勢。本文即專門討論一種用于EPS系統的PMSM電機伺服系統的設計。該系統使用XC164CM作為EPS系統的核心控制芯片,同時采用定子磁場定向原理(FOC)實現永磁同步電動機的伺服控制。實驗結果證明,該系統設計合理,性能可靠,非常具有針對性。
XC164CM是目前廣泛使用的C166系列單片機的一種新的派生型,是基于增強型 C166S V2結構的,優于現有的16位解決方案。XC164CM具有很強的 DSP性能和先進的中斷處理,加上各種高效靈活的外設和高性能片上Flash,使得它成為工業和汽車應用設備控制的理想選擇。其靈活的智能PWM單元CAPCOM6E提供交流電機(AC), 直流無刷電機(BLDC)和開關磁阻電機(SRM)等各類電機的PWM控制。而高速、高分辨和具有同步觸發功能的ADC能快速和精確地轉換復雜的模擬環境變量。具有自動網關功能的高速TwinCAN模塊則能實現高效的網絡化的方案。XC164CM封裝為P-TQFP-100,框圖如圖2所示。

C166S V2與C166相比有不少優異之處。首先,它采用增強哈佛結構(程序存儲器和數據存儲器具有各自的多帶寬總線)、具有單周期指令集, 在40MHz的CPU時鐘時具備40MIPS的指令執行速度。其次, 它不僅有5級指令流水線, 還新增了2級預取指令流水線, 具有無可比擬的程序分支預測判斷能力, 從而實現零周期程序跳轉。它除了擁有高速硬件乘/除單元外, 還特別集成了單周期乘加器(MAC)單元, 從而具有強勁的DSP功能(含DSP指令集), 使得其運算能力大為提高。配套的DSP函數庫能使用戶快捷方便地實現各種DSP運算如FIR, IIR, FFT, 等等。C166S V2 還集成了帶JTAG接口的片上調試系統(OCDS) 。
XC164CM 的智能PWM單元CAPCOM6E如圖3所示。它能產生各種類型的PWM波形, 如SPWM, 空間矢量PWM (SVPWM)等。本系統使用SVPWM, 其產生原理如圖4所示。8種可能的開關狀態形成6種可能的磁場方向(加上兩個零矢量), 磁場矢量可以達到六邊形(逆變器的運行區域)內的所有點, 而不能超出該六邊形。PWM開關頻率為20KHz。
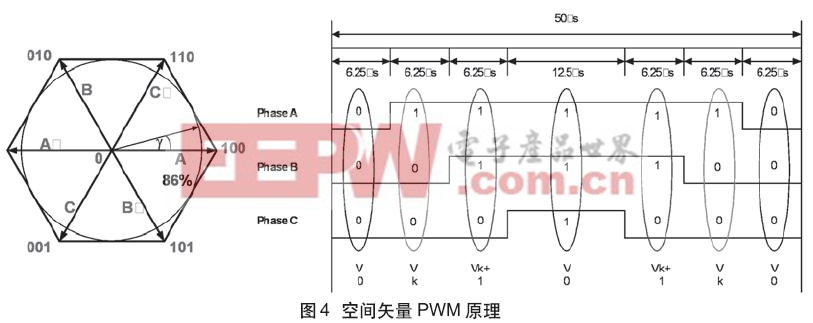
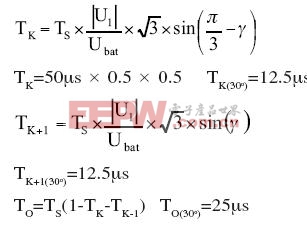
其時間計算公式(30o)為:

磁場定向(FOC) 控制及其實現
為建立永磁同步電動機的轉子軸(d, q軸)數學模型,作如下假定:
?忽略電機鐵心的飽和;
?不計電機的渦流和磁滯損耗;
?轉子沒有阻尼繞組。
在上述假定下,以轉子參考坐標(軸)表示的電機電壓方程如下:
定子電壓方程

式中:ud,uq為d,q軸電壓; id,iq為d,q軸電流;Ld,Lq為定子電感在d,q軸下的等效電感; Rs為定子電阻; we為轉子電角速度; yf為轉子勵磁磁場鏈過定子繞組的磁鏈; p為微分算子; Pn為電機極對數; wm為轉子機械轉速; J為轉動慣量; TL為負載轉矩。
上述方程是通過a,b,c坐標系到d,q轉子坐標系的變換得到的。這里取轉子軸為d軸,q軸順著旋轉方向超前d軸90o電角度。其坐標變換如下:
克拉克(CLARKE)變換
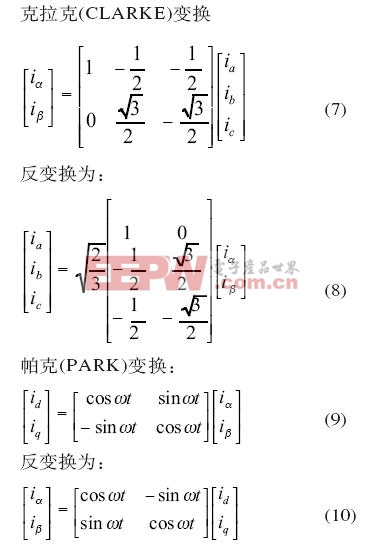
從轉子坐標來看,對于定子電流可以分為兩部分,即力矩電流iq和勵磁電流id。因此,矢量控制中通常使id=0來保證用最小的電流幅值得到最大的輸出轉矩。此時,式(5)的電機轉矩表達式為
由式(11)看出,Pn及yf都是電機內部參數,其值恒定,為獲得恒定的力矩輸出,只要控制iq為定值。從上面d, q軸的分析可知,iq的方向可以通過檢測轉子軸來確定。從而使永磁同步電機的矢量控制大大簡化。整個PMSM電機的磁場定向控制(FOC)如圖5所示。

評論