基于CAN總線的自動離合器控制器設計

摘要: 設計了一種基于CAN 總線的自動離合器控制器, 采用高性能微處理器XC878 完成離合器控制器軟硬件開發。設計了離合器執行電機的驅動電路及自動離合器控制程序。針對離合器與發動機協調控制的需要,設計了CAN 總線節點接口電路及一套簡單、實用、高效的CAN 總線通信協議。
本文引用地址:http://www.j9360.com/article/197485.htm試驗表明,所設計的自動離合器控制器在功能上滿足實際應用的需要,CAN 通信模塊能夠準確無誤地收發數據,可靠性高。
隨著社會的發展, 人們對汽車的舒適性和安全性要求越來越高, 而手動檔汽車因其繁重的選換檔及離合器操作增加了駕駛難度。對于駕駛新手而言, 又會產生坡道起步易熄火、油耗大、離合器磨損嚴重等問題[ 1]。自動檔汽車雖然駕駛操作簡單, 但其造價高,開發難度大。本文設計的電控自動離合器ACS(Automatic Clutch System) 是在手動變速箱基礎上安裝電控系統,取消離合踏板,實現自動離合。ACS 的優勢十分明顯:與手動擋相比,其駕駛操控更為簡單, 具有加速快、駕駛舒適的特點; 與自動變速器汽車相比,ACS 具有造價便宜、維修方便、經濟、省油。
1 系統功能
ACS 將現代電子控制技術用于控制干式摩擦離合器, 模擬優秀駕駛員的操縱動作和感覺, 實現最佳的離合器結合規律, 其實質是為汽車駕駛員配備一個操縱離合器的機械人, 實現自動離合器的功能。本文設計的ACS 控制器主要實現了如下幾大功能。
(1) 換檔離合: 控制器接收到換檔信號后, 離合器迅速自動分離, 換檔到位后離合器自動結合, 結合規律由電控單元依據汽車行駛工況確定。
(2) 坡道起步: 駕駛員踩制動踏板, 啟動發動機, 將換檔手柄置于一檔或倒檔, 松開手制動器, 解除制動后不踩油門踏板汽車能夠自動慢速行駛, 起步平穩, 沖擊小,不熄火。
(3) 熄火保護: 汽車行駛過程中, 車速和發動機轉速低于設定值后離合器自動分離, 車速和發動機轉速高于設定值后離合器再自動結合。
(4)CAN 通信:ACS 控制器通過CAN 總線接口與發動機控制器實現數據通信, 為離合器與發動機的協調控制提供數據支持。
2 系統的硬件設計
2.1 控制器組成
自動離合器控制器原理框圖如圖1 所示。本系統的微處理器選用英飛凌高性能的8 位微處理器XC878CM, 工作頻率最高可達27 MHz, 其片內硬件資源十分豐富, 片內集成了MultiCAN 控制器、捕獲/比較單元6(CCU6) 、高性能ADC 模塊等。XC878CM 出色的性能完全滿足本系統的設計需要。本系統的硬件部分主要包括電源模塊、數據采集模塊、CAN 通信模塊、執行電機驅動模塊等。
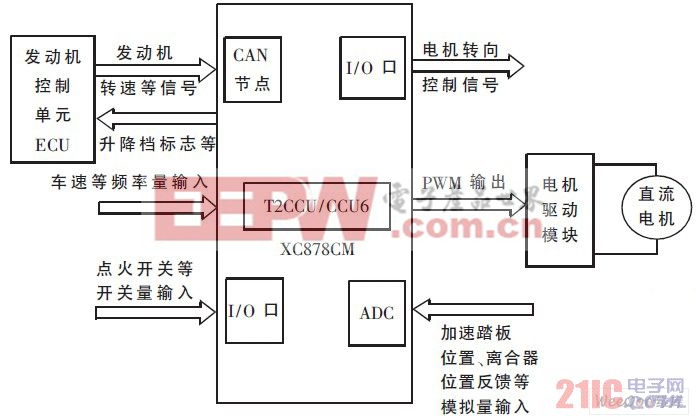
圖1 自動離合器控制器原理圖
(1) 電源模塊整車低壓控制系統通過12 V 電池供電,8 位MCU 采用5 V 供電。所以本系統需要采用電源芯片進行電壓的轉換和隔離。本系統選用英飛凌電源芯片TLE4290 , 該芯片可提供穩定的5 V 電壓, 誤差在2%以內, 輸入電壓最高可達42 V。經測試, 其工作可靠, 滿足系統要求。
(2)CAN 通信模塊CAN 通信模塊使用XC878CM 片內MultiCAN 控制器和英飛凌高速CAN 收發器IFX1050G作為CAN 通信的硬件組成。CAN 模塊負責離合器控制器和發動機控制器之間的數據交換和共享, 為發動機與離合器的協調控制提供數據通信支持。
(3) 執行電機驅動模塊本系統使用的執行電機為額定電壓為12V 的直流電機。單片機使用一個IO 口控制執行電機的轉動方向, 一路PWM 輸出控制電機的轉速。
PWM 波由單片機內含的CCU6 模塊配置為比較模式產生。單片機通過英飛凌電機驅動芯片BTS7810K 實現對執行電機的控制。






評論