基于CAN總線的自動離合器控制器設計

CAN 節點硬件電路主要包括: 帶有CAN 控制器的微控制器和用于數據收發的CAN 收發器。本文選用的微處理器XC878CM 帶有片內的CAN 控制器, 主要負責CAN 的初始化和數據處理。MultiCAN 模塊集成了除收發器外CAN 總線控制器的所有功能。此外,MultiCAN 還具有先進的驗收濾波功能、先進的數據管理、先進的中斷管理等優良特性。CAN 的收發器種類很多, 本設計中選用英飛凌公司的高速收發器IFX1050G。CAN 節點的接口電路圖如圖3 所示。
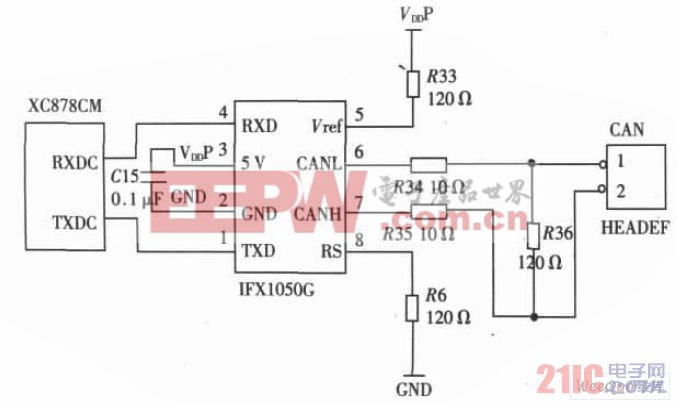
圖3 CAN 節點的接口電路圖
3 軟件設計
電控單元ECU 的控制軟件主要由離合器控制程序和CAN 總線通信程序組成。
3.1 離合器控制軟件設計
離合器的控制程序包括三個部分: 離合器分離控制程序、起步結合控制程序、換擋結合控制程序。其中分離控制程序比較簡單,ECU 得到分離指令后, 離合器全速分離, 并且準確地在完全分離點停止即可。離合器的控制難點在于起步結合控制。離合器的起步結合過程既要保證車輛起步的平穩性、舒適性、起步不熄火, 又要保證起步的快速性, 減少滑摩功的產生, 延長離合器使用壽命。因此, 要取得較好的控制效果除了對離合器的結合量進行控制外, 還要對離合器的結合速度進行控制, 并通過與發動機的協調控制, 提高控制效果。圖4 為起步結合控制軟件流程圖。換擋過程中離合器的結合控制與起步控制在控制策略上類似, 在此不再贅述。
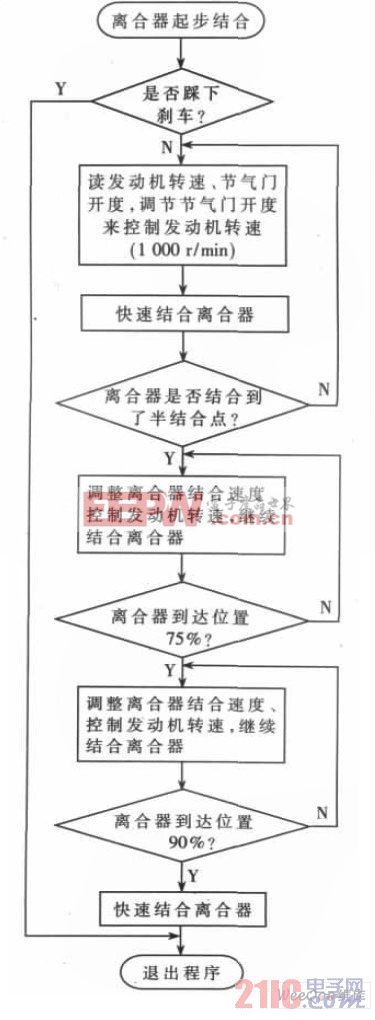
圖4 起步結合控制軟件流程圖






評論