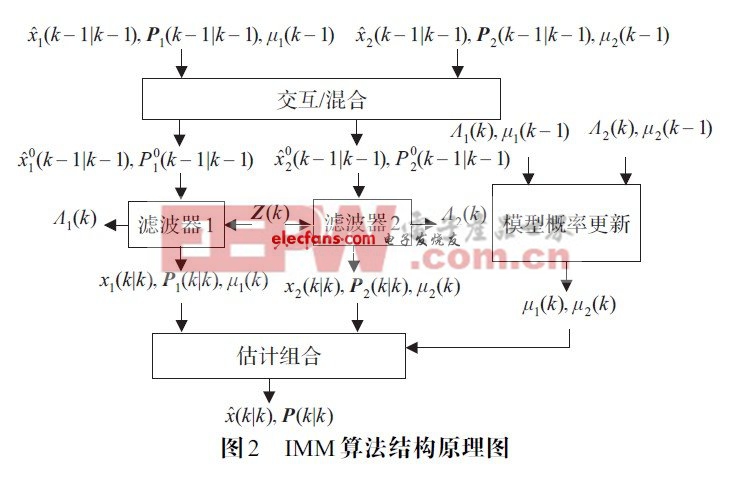
一種雷達防追尾預警系統設計 作者: 時間:2011-08-02 來源:網絡 加入技術交流群 掃碼加入和技術大咖面對面交流海量資料庫查詢 收藏 <a target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=88&cb=INSERT_RANDOM_NUMBER_HERE&n=a635e61e' border='0' alt='' /></a> <a target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=87&cb=INSERT_RANDOM_NUMBER_HERE&n=a576c0a2' border='0' alt='' /></a> 步驟2 模型條件濾波: 對應于模型Mj(k),以X 0j (k - 1|k - 1),P0j(k - 1|k - 1)及Z(k)作為輸入進行卡爾曼濾波。 卡爾曼預測方程: 預測誤差協方差陣: 卡爾曼增益: 濾波方程為: 波誤差方差陣: 步驟3 模型概率更新: i = 1rΛj(k)cj_,而Λj(k)為觀測Z(k)的似然函數: 其中: 步驟4 輸出交互:圖2 為IMM算法結構原理圖 上一頁 1 2 3 下一頁














評論