基于單片機與GPS/GPRS 的車載監控終端的設計與實現

引言
本文引用地址:http://www.j9360.com/article/197227.htm隨著科技的發展,汽車的普及和道路的建設,城際間的經濟往來更加頻繁,活動的區域也越來越大,由此產生了交通擁擠、車禍增加、廢氣排放量增加等嚴重問題。智能交通系統(IntelligentTransportSystem)的出現有效地改善了以上各種交通問題。智能交通系統是將先進的信息技術、通訊技術、傳感技術、控制技術以及計算機技術等有效地集成運用于整個交通運輸管理體系,而建立起的一種在大范圍內、全方位發揮作用的,實時、準確、高效的綜合的運輸和管理系統。它通過人、車、路的和諧、密切配合提高交通運輸效率,緩解交通阻塞,提高路網通過能力,較少交通事故,降低能源消耗,減輕環境污染。
車載監控系統是智能交通系統的一個分支,它集先進的無線定位技術、地理信息系統和現代移動通信技術于一身,不僅在智能交通系統中擔負主要作用,同時還能提供防盜防搶劫報警、緊急醫療求助、娛樂等多種服務。本文就選取整個系統中的車載終端模塊進行設計與實現,并且介紹了下GPS車載終端。
一、關于GPS車載終端
GPS車載終端又稱GPS車輛管理系統或GPS車載監控系統,它是依托衛星定位、地理信息及無線通信等技術手段,實時掌握車輛位置和狀態,提供調度管理信息的軟硬件綜合系統。
1.車輛監控系統總體結構
車輛監控系統由GPS衛星、車載終端、通信網絡(GPRS和Internet)和監控中心四大部分組成。車輛在運行過程中,車載終端的GPS接收機接收定位數據,計算出車輛當前的經度、緯度、速度、航向和其他信息(時間、狀態)等,然后通過GPRS網絡傳送到具有靜態IP地址的監控中心,并存人中心數據庫。監控中心在接到車輛上傳的信息后,根據車輛的當前狀況科學地進行調度和管理,從而提高運營效率。客戶也可以通過Internet或電話來查詢特定車輛的當前狀況。
系統的總體結構如圖1所示。

圖1 系統總體結構示意圖
2.車載終端的特點
1、外觀小巧,性能穩定。主機如煙盒大小,可以安裝在很隱蔽的地方,GPS天線也無須安放在外,因為它采用的是超強度接收的第四代模塊,所以可以安放在車內比較隱秘的地方。主機內部元器件全部采用進口工業級材料,核心GSM模塊為德國的西門子品牌,GPS模塊為HOLUX SIRF III,核心單片機為穩定性最強的P IC,其它IC元件為德國TI公司的。
2、安裝簡單。只需要駁接原車兩條電源線即可,斷油裝置可接可不接,如果需要安裝斷油裝置的話只需將原車油泵供電線剪斷然后串聯到本機即可。
3、誤報警率低。本產品注重人性化設計,將誤報警率降到最低。
4、多重防范,確保有警必報。
3.車載終端的功能
車載GPS/GPRS終端的衛星接收模塊采集到GPS衛星數據,經過數據處理得到車輛的地理坐標信息。該信息通過車載終端處理之后,由GPRS無線通信模塊發送到GPRS無線通信網上。GPRS網絡根據相應的協議在車載終端和接人Internet網的監控中心之間建立一條支持TCP/lP的數據通道。車載GPS/GPRS終端依靠該數據通道和監控中心之間進行信息的交互。監控中心還可以通過該通道向下發送控制命令和服務信息。
另外,除了車輛定位,系統還可以提供諸如防盜防搶、對移動車輛進行斷油斷電、顯示調度信息、醫療求助、移動電話等多種服務。
二、車載終端硬件設計
車載終端硬件系統以ATMEGA64(L)單片機和GPS+GPRS模塊為核心,其結構如圖2所示。
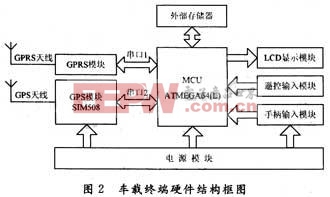
1.信息處理和控制模塊
本文采用AVR系列的單片機系統,主要是進行信息處理和控制車載臺的各組成部分按照通信協議的要求執行響應的操作。該模塊由CPU、外部存儲器、I/O接口以及控制邏輯電路組成。CPU采用ATMEGA64(L)單片機實現,該單片機具有兩個串口,分別用來與GPS和GPRS模塊通信。它是基于增強的AVRRISO結構的低功耗8位CMOS微控制器,曲于其先進的指令集以及單時鐘周期指令執行時間,ATMEGA64(L)的數據吞吐率高達1MIPS/MHz,從而可以減緩系統在功耗和處理速度之間的矛盾。
2.GSM/GPRS+GPS模塊
GSM/GPRS+GPS模塊采用SIMCOM公司的SIM508模塊。SIM508模塊是一款將三頻GSM/GPRS和具有20通道能力的GPS完全整合到一個模塊中(34mm×55mm×3mm)的產品。該產品的設計完全滿足車載應用環境要求(溫度、濕度、防震等)。特別地,整合了附加元器件的SIM508可以節省很多時間和成本。車載終端通過模塊中的GPS部分獲得車輛的具體位置,經過CPU處理后,顯示給用戶并通過GPRS部分將該信息發送到監控中心,以實現對車輛的實時定位跟蹤,同時還能實現語音和短消息通信功能。
3.輸入輸出模塊
車載終端的輸入主要有遙控器輸入(主要輸入設備)和手柄輸入兩種方式。考慮到在緊急情況下手柄輸入的局限性,本文采用遙控器作為主要輸入設備,可以用來完成語音撥號、收發短消息、醫療求助、維修求助、啟閉設備等功能。
輸出通過12232F液晶模塊實現,可以顯示圖形,也可以顯示7.5×2個(16×16點陣)漢字,與外部CPU接口可以采用并行或串行,考慮到編程的簡易性,本車載終端采用串行接口連接。
三、車載終端軟件設計
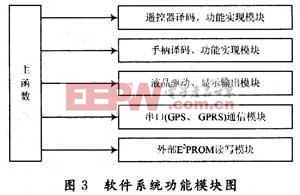
本軟件系統采用模塊化設計方法,每個模塊實現一個功能或一個協議,各功能模塊以子函數形式出現,縮短了軟件開發時間,易于程序修改和移植,同時,在編寫軟件時,還留有一些軟件應用接口,便于軟件升級,如增加新協議。
軟件系統功能模塊如圖3所示。
1.軟件系統的工作流程
車載終端軟件系統的主要功能是由主程序完成的。主程序采用狀態機的系統結構,其工作流程如圖4所示。
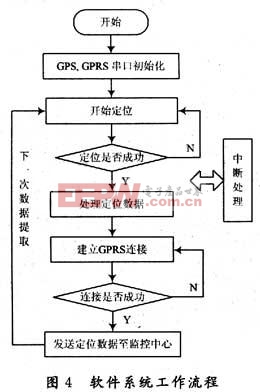
程序工作時先進行GPS和GPRS串口初始化工作,然后進入主控制循環。在主控循環中,先識別GPS數據是否有效,即定位是否成功,定位成功則系統轉到下一個狀態,建立GPRS連接,否則重新定位。建立好GPRS連接后便可以向監控中心發
送處理后的定位數據。同時,主程序運行的過程中,還能響應遙控器輸入中斷請求,以便實現其他功能。
2.軟件系統協議棧
借鑒于OSI模型和標準的TCP/IP協議棧,本系統采用四層網絡傳輸協議:傳輸層、網絡層、數據鏈路層和物理層。系統協議棧結構如圖5所示。
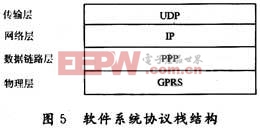
考慮到車輛監控系統中幾十、幾百甚至上千個車載終端的情況,對于這種數據量小、多點分散、實時性要求高、終端數量多的應用,傳輸層采用UDP比TCP會更好一些。IP協議作為網絡層協議,主要是將數據流切割成適當的大小,然后將這些數據包通過選擇路由,利用不同的路由來傳送到目的地IP。在物理層之上,PPP協議作為GPRS在物理層之上的惟一指定的數據鏈路層協議,通過CRC校驗、確認等手段將原始的物理層連接改造成無差錯的數據鏈路。PPP協商成功后,系統將成功遠程登錄Internet,并得到網關分配給自己的IP。終端與網絡之間的物理層通道就是GPRS連接。具體的GPRS協議都已被做在GPRSmodem中,通過數據端對GPRSmodem正確的AT指令設置后,就可以用AT撥號指令進行撥號連接,當收到GPRSmodem的撥號反饋應答后,一條物理通道即GPRS信道就在本終端中和網絡之間建立起來了。
3.城市智能交通的未來發展趨勢
隨著城市交通問題的日益發展,城市交通綜合信息平臺、全球定位與車載導航系統、城市公共交通車輛以及出租車的車輛指揮與調度系統、城市綜合應急系統都將迎來較大的發展機遇。
總體而言,城市智能交通系統的發展趨勢將表現為綜合化、多部門驅動型的發展模式。由于城市智能交通體系將涉及相關的市民、公安交通管理、交通部門車輛管理、城市建設、通信等相關部門工作,因而未來城市智能交通的發展過程必然是一個涉及以交通與公安為主的多部門驅動的發展過程。
四、總結
本文介紹了基于GPS/GPRS的車輛監控系統終端的實現方案,給出了詳細的軟件及硬件組成和設計實現,經多次測試系統穩定,效果良好。該系統可以應用手指揮監控系統、城市租賃汽車管理系統、物流運輸系統、醫療救護系統等領域,市場前景極為廣闊。

tcp/ip相關文章:tcp/ip是什么










評論