基于支持向量機的車牌定位方法

1 引 言
智能交通系統是一個熱點研究領域,受到日益廣泛的關注。車牌識別系統(LPR)是計算機視覺、模式識別技術在智能交通領域的一個重要應用,包括車牌定位、車牌字符分割、字符識別三部分。其中車牌定位是整個系統中的關鍵步驟。
(1)基于Hough變換的方法,分析車牌具有明顯的矩形邊框,利用Hough變換檢測區域邊界實現定位。
(2)基于邊緣檢測的方法,利用了車牌字符邊緣豐富的特征,結合數學形態學或區域生長方法實現牌照定位。
(3)基于神經網絡的方法,利用圖像的顏色或紋理特征訓練神經網絡,然后用訓練好的分類器對圖像各個像素進行分類,再對分類結果綜合,得到牌照的準確定位。然而由于光照不均、污染等因素影響,可能使得牌照區域邊界不明顯或存在多個干擾區域,從而增加了準確定位的難度。
要提高車牌定位的精度,應充分利用他自身提供的信息,突出車牌區域而抑制非車牌區域。車牌區域有著豐富的紋理,尋找一種良好性能的分類器,凸現這種紋理特征,使他與其他區域區別開來。支持向量機(Support Vector Machine,SVM)正是這樣一種分類學習機制,建立在結構風險最小化(Structural Risk Minimization,SRM)準則之上,已經在文本識別,人臉識別,紋理分類等模式識別領域取得了成功。
本文使用SVM機制自動定位車牌區域,首先對每幅訓練圖像切分成若干個N×N大小的圖像子塊,把每個字塊分別標注為車牌和非車牌區域兩類,提取子塊圖像的特征向量訓練SVM分類器;然后使用該分類器對測試圖像中的各個像素進行分類,最后通過后期處理結合車牌的先驗知識實現車牌區域的定位。
2 SVM原理
SVM基于SRM準則構造最優超平面,使每類數據之間間隔最大,同時保持分類誤差盡可能小。Cover定理指出:一個復雜的模式識別分類問題,在高維空間比低維空間更容易線性可分。實際上SVM實現了這樣的思想:通過某種事先選擇的非線性映射將向量x映射到一個高維特征空間,然后在這個空間中構造最優分類超平面。
對于兩類模式分類問題,在非線性可分的情況下,通過一個非線性變換φ:x→φ (x),將給定的模式數據映射到高維特征空間,再構造分類超平面,表示為決策面:
![]()
考慮到兩類樣本離決策面都應有一定距離,決策面應滿足不等式約束:
|
完全滿足式(2)的超平面是不存在的。考慮到存在一些樣本不能被決策面正確分類,引入松弛變量ξi(≥0),約束條件式(2)變為:
![]()
滿足要求的超平面不止一個,尋找最優超平面可以歸結為二次規劃問題:
![]()
其中C被稱為懲罰因子,通過C可以在分類器的泛化能力和誤分率之間進行折衷。利用拉格朗日函數求解可得優化問題(4)的對偶形式,最大化函數:
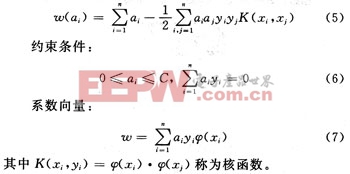
求解式(5)可以得到ai,代入式(7)可以確定ω,分類函數可表示為:
![]()
3 SVM定位車牌區域
車牌區域準確定位是一種非線性可分的模式分類問題。








評論