電力機車邏輯控制單元測試臺硬件系統設計

0 引言
電力機車邏輯控制單元(Logic Control Unit——LCU)是電力機車上重要的控制部分,它使用現代化的電子元件來取代原來電力機車上的有觸點繼電器,從而提高了電力機車控制系統的安全性和可靠性。目前,我國生產的新型電力機車上都裝置了LCU,而老型電力機車經過大修后,也都加裝了該裝置。但是,由于電力機車的運行環境通常十分惡劣,在機車邏輯控制單元使用一段時間后,可能會導致LCU故障的發生,所以必須定期對LCU進行全面的檢測。本文主要針對SS4G型電力機車LCU測試臺的硬件系統提出了一種可行的設計方案。
1 LCU測試臺的系統結構
本文中的LCU測試臺系統采用的是模塊化設計思想,系統的主要功能模塊由上位機、通信模塊、數據采集及控制模塊、程控電源及監控模塊、模擬負載模塊組成。其LCU測試系統框圖如圖l所示。

1.1 上位機
上位機是本測試臺的核心部分,主要功能是模仿電力機車的控制信號并發送給LCU,同時根據反饋數據對LCU的運行情況進行檢測,以查找錯誤,分析原因。另外,上位機還具有LCU邏輯梯形圖繪制功能;根據LCU邏輯梯形圖,自動或手動完成邏輯測試表的功能;自動或手動完成LCU測試功能,并具有測試報表打印功能和不斷豐富故障數據庫的功能。本上位機采用的CPU為賽揚1.8 GHz,內存512 MB,操作系統為WindowsXP.80 GB硬盤空間。同時具有良好的操作界面和人機交互能力,而且圖形界面簡潔直觀,操作方便簡單。
1.2 通信模塊
通信模塊主要負責上位機和其他各功能模塊之間的通信,并在進行單機箱測試時模擬另外一個機箱來完成聯機測試。本設計使用RS485作為上位機的通信協議,其它模塊間使用CAN總線進行通信。設計中,為了防止總線干擾信號進入系統,影響系統運行的穩定性,本設計對單片機和CAN總線之間進行了數據隔離。其通信模塊的結構框圖如圖2所示。

1.3 數據采集及控制模塊
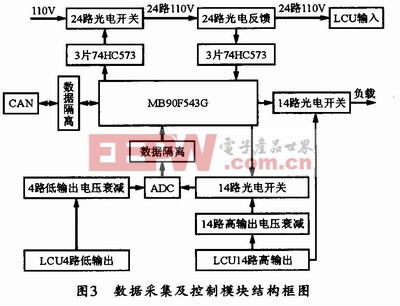
數據采集及控制模塊的主要功能是將通信模塊發過來的邏輯控制命令(5 V)轉換成LCU所能接收的邏輯控制命令(110 V),并對LCU輸出信號進行采集并發回上位機,以供上位機檢測。數據采集及控制模塊共由8塊一模一樣的電路板組成,這些電路板與被測SS4G型電力機車的LCU一一對應。
數據采集及控制模塊的具體工作原理是:上位機通過通信模塊的CAN總線向本模塊發送相關控制命令,然后單片機根據命令來控制24路光電開關的接通或關閉。為LCU板提供24路輸入邏輯控制信號(高電平為70~135 VDC,低電平為O V)。為了確保24路邏輯控制信號的正確,本設計使用24路光電反饋電路將其轉化成TTL電平信號,再送回單片機進行判斷。每塊LCU控制板的輸出有14路高輸出和4路低輸出,所以,對其輸出信號的采集也分為14路高輸出采集和4路低輸出采集,它們共用一個AD轉換器,并采用分時復用的方式來對各個輸出進行AD轉換。另外,在對LCU的高輸出進行檢測時,還需檢測其在帶載情況下的輸出電壓。
本設計我們同樣采用分時復用的方式來對高輸出進行帶載情況測試。此外,本模塊還具有自檢功能。數據采集及控制模塊的結構框圖如圖3所示。

霍爾傳感器相關文章:霍爾傳感器工作原理
光電開關相關文章:光電開關原理 霍爾傳感器相關文章:霍爾傳感器原理





評論