基于PXI和cRIO的ESP硬件在環仿真平臺

控制器上運行的為ESP控制算法。控制器通過接收各種傳感器的信號,判斷車輛狀態是否為危險工況,如果檢測到危險,就會輸出控制指令給執行器,通過電機和電磁閥的動作來對制動系統進行主動干預,同時通過CAN通信發指令給發動機管理系統,控制車輛驅動,從而化解危機。考慮試驗臺的兼容性,控制器部分可以采用NI cRIO作為控制器,并采用第一代ESP控制器(主控芯片為C167),也可以采用第二代ESP控制器(主控芯片為XC164)。
仿真結果
將仿真結果與實車試驗結果相對比,兩者吻合程度很好,說明該硬件在環仿真平臺能有效地對車輛運動狀態進行仿真。該仿真平臺的搭建可以加速ESP控制算法的開發。
圖4為在某種參數下測試ABS功能的一組輪速數據,和實車試驗結果很類似,說明仿真平臺精度很高。
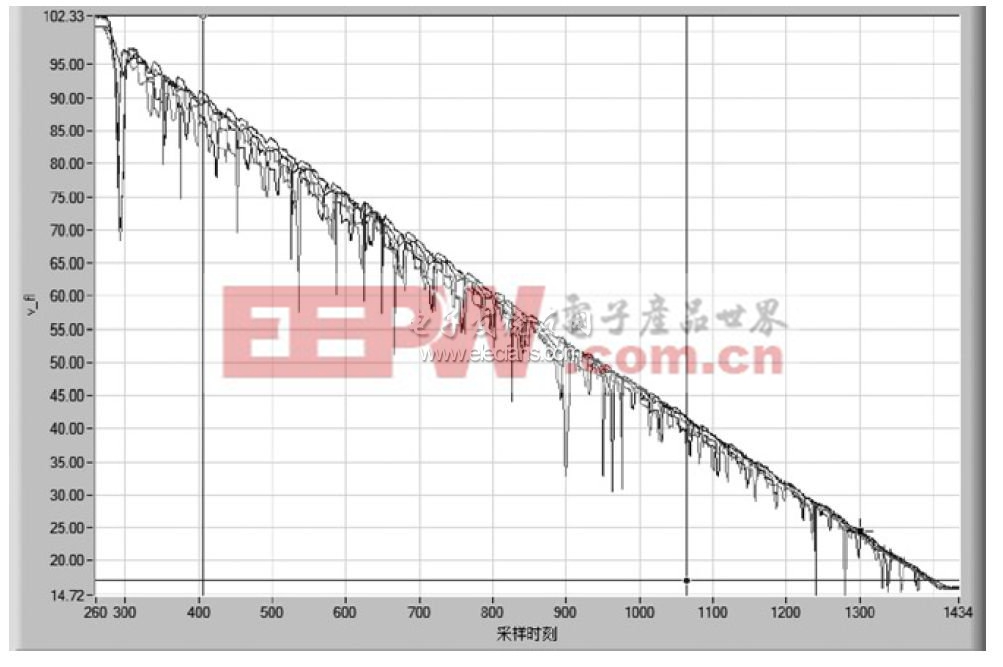
圖4 某種參數下測試AVS功能的一組輪速數據
結論
本文基于PXI和cRIO搭建了ESP硬件在環仿真平臺。平臺可以將控制器放在仿真回路中,方便對控制器中的算法進行測試。仿真試驗臺的搭建提高了ESP控制算法的開發速度。





評論