基于PXI和cRIO的ESP硬件在環仿真平臺

上位機監控軟件主要分為兩個部分:仿真過程監控和查看仿真數據。仿真過程監控包括參數調用、仿真控制、參數實時監控、仿真過程中駕駛員輸入等功能,并且可以對仿真模式、換檔策略、仿真時間等進行配置,方便靈活地實現各種情況的仿真。
查看仿真數據部分,可以觀察對比仿真數據,仿真過程中車輛運動回放、數據保存和調用情況。仿真過程控制界面如圖3所示。
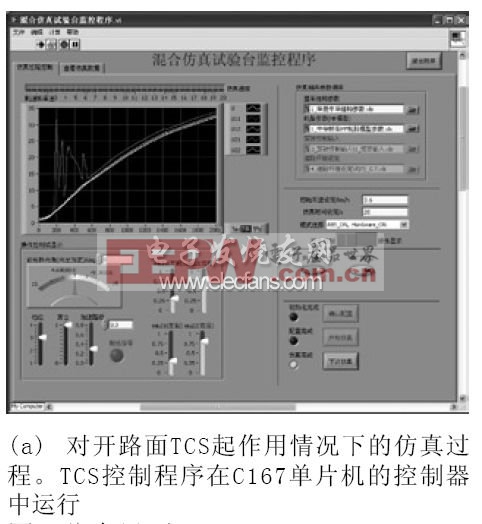
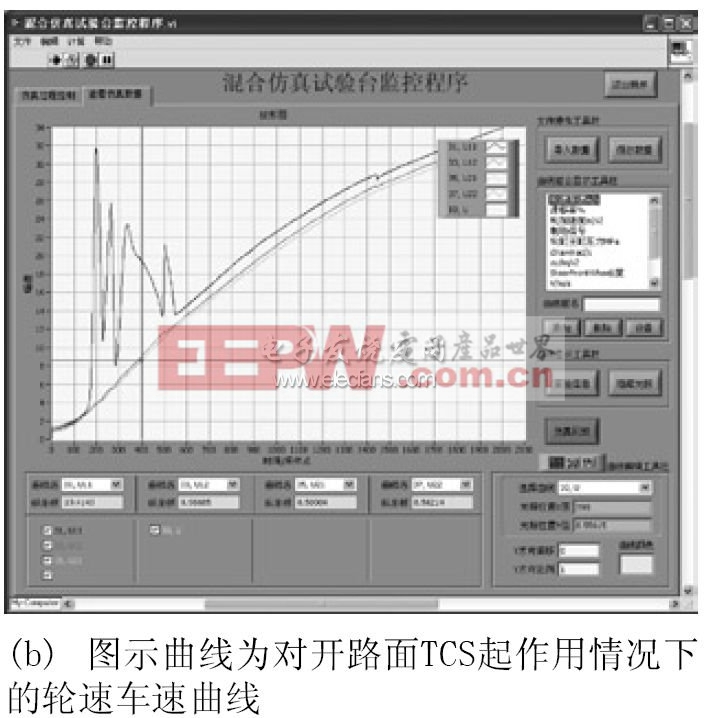
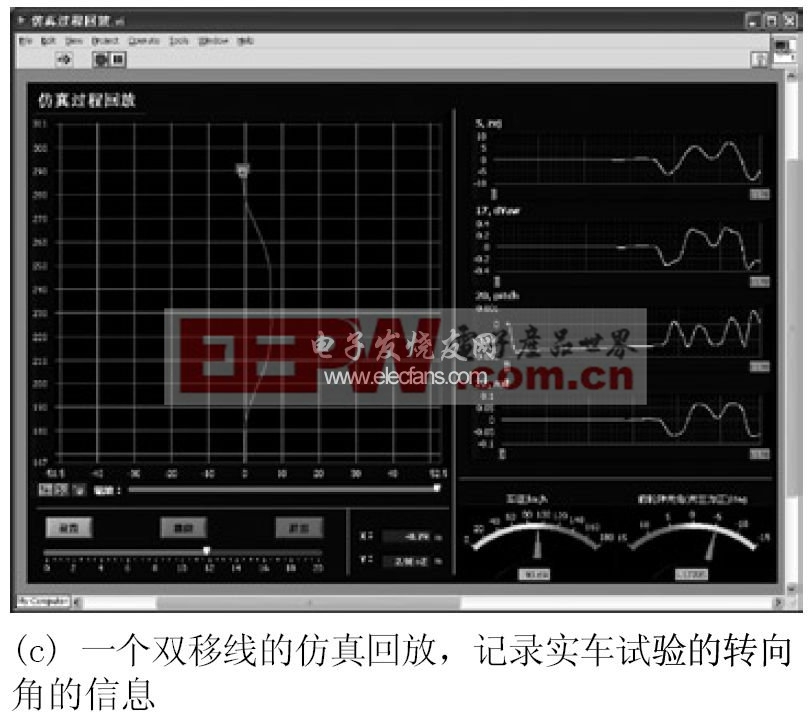
圖3 仿真界面
其中,圖3(b)中可以觀察仿真過程中70個參數的變化曲線。可以保存和調用仿真數據,可以通過點擊右下方的“仿真回放”按鍵,圖像化顯示車輛運行軌跡。 圖3(c)中,可以將記錄下的轉向角信息在仿真過程中按照實際的時間間隔輸入給系統,仿真可以得到車輛的響應情況。
下位機仿真軟件
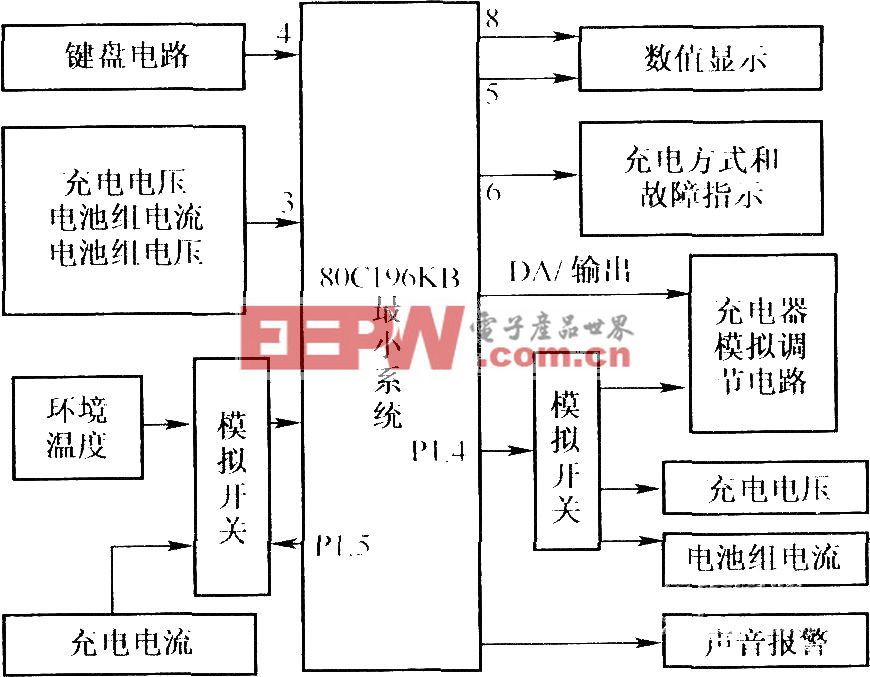
下位機運行整車模型,采用了15自由度整車模型。這15個自由度分別為:車輛縱向、橫向、垂向的平動和轉動這6個自由度,四個車輪的轉動和垂向平動8個自由度,轉向系統的1個自由度。
在仿真過程中,下位機以1ms為周期通過數據采集卡采集主缸和4個輪缸的壓力信號,從而計算車輛受力,得到車輛運動狀態。并將狀態參數通過數據采集卡輸出給控制器。同時下位機將車輛運動狀態參數以10ms為周期將數據保存在下位機內存中,仿真結束后上傳到上位機。并且下位機以10ms為周期不斷檢測上位機所發出的控制信號,比如轉向信號、換檔信號、油門信號等。這種并行結構的實現,使得復雜的功能得以方便地實現。





評論