ADuC7128實現寬頻帶相位測量系統

相位測量在工業自動化儀表、智能控制及通信電子等許多領域都有著廣泛的應用,要想滿足一定的測量精度就要求微處理器的時鐘頻率足夠高。同樣,運用此方法對高頻信號進行測量時,由于相位差相對較小,一般的微處理器時鐘頻率,已經無法滿足高精度的計數要求,這樣必然會影響相位測量的精度。所以,必須提高標準時鐘的計數頻率,才能滿足測量要求。這樣,一方面增加了設計本身的難度,另一方面也提高了選用元器件的要求。
本文引用地址:http://www.j9360.com/article/194733.htm本系統首先采用頻率變換法將高頻輸入信號轉換成低頻信號后,且保持原信號的相位不發生變化,再利用基于ADuC7128 為控制核心的數字測相系統進行測量,從而完成了寬頻帶輸入信號的相位測量。
1 差頻變換原理的引入
利用數學模型將被測信號和參考信號描寫成如下形式:
被測信號:
參考信號:
其中: A 為被測信號的幅值; B 為參考信號的幅值; f為被測信號的頻率; f0 為參考信號的頻率; θ 是被測信號的幅角。
同時,將兩個信號y1 和y2 送入混頻器內進行混頻操作相乘后,會得到信號y3。
再將y3 送入低通濾波器進行濾波處理,濾除高頻信號,剩下的低頻信號數學表達式為:

y3 與y1 相比,幅度呈線性變化,幅角不變,但頻率降低,其頻率是被測信號與參考信號的頻率差。對于測量y3 來說,比直接測量y1 容易得多。這樣把差頻變換法應用到高頻信號的相位測量上,既可以提高相位測量的精度,又可以拓寬輸入信號的頻帶。
2 數字測相系統設計
2. 1 硬件結構設計
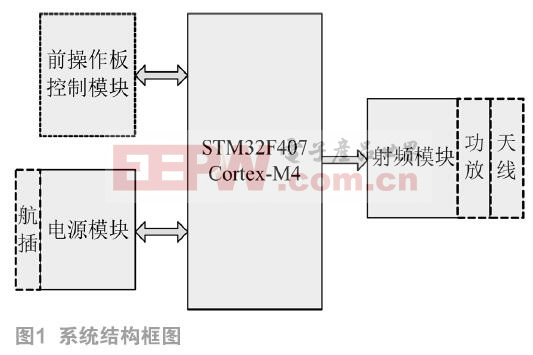
如圖1 所示,本系統主要由信號調理電路、頻率變換電路以及微處理器控制電路3 部分組成。

圖1 硬件電路原理框圖

評論