基于STM32的多調制方式信號源的設計

作者 韓曉冰 邢磊 西安科技大學信息與通信工程學院(陜西 西安 710054)
本文引用地址:http://www.j9360.com/article/201810/393369.htm韓曉冰(1965-),男,陜西西安人,教授,研究方向,無線通信。
邢磊,男,河北承德人,碩士研究生,研究方向,嵌入式、無線通信。
摘要:基于STM32F407ZGT6設計了一款多種調制方式、寬頻帶的信號源,覆蓋頻率范圍為50 MHz-4 GHz,并且帶有功率放大器,可以將信號放大輸出,輸出電平范圍可達0 dBm-30 dBm。本設計主要可以分成兩大部分,主控板與前操控版,前操控版帶有按鍵,通過UART將輸入的數據發送給主控板,主控板將會根據傳輸的數據協議解析數據,并控制信號發生器工作,信號通過功放放大,最后通過天線發射出去。
0 引言
現在市場上主要的信號源主要是面向實驗室測試使用,用于野外部隊進行無線電監測測向訓練的非常少。而且很多信號源沒有功放,不能發射大功率信號,這就嚴重限制了信號覆蓋范圍,無法模擬真實的電磁環境。
1 系統整體方案設計
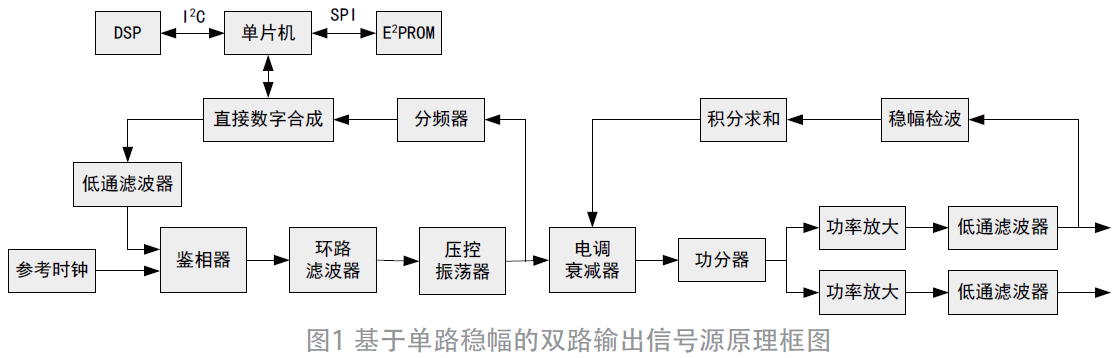
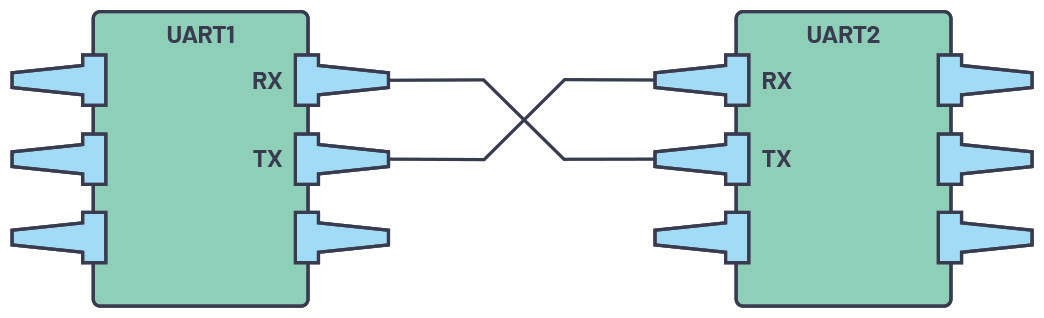
本系統主要由前操控板,主控板組成。前操控板主要是進行按鍵輸入數據和顯示輸入信息、系統調試信息等,并將數據通過UART傳送給主控板。主控板根據傳輸協議將數據解析,根據解析出的數據控制射頻模塊產生相應信號,并通過功放將信號放大,最后將信號通過天線發射出去,信號源發射信號使用兩種天線,50 MHz-1 GHz用的是拉桿天線,發射1 GHz到4 GHz使用的是雙錐天線。GPS/BD定位系統和RFID在前操控板,當GPS/BD收到信息后并將數據傳送給前操控版,前操控版將信息顯示出來。系統結構如圖1所示。

2 系統硬件設計
本系統主要由前操作板、主控板、電源模塊三部分組成。每部分上都有其對應的不同的功能,這幾個部分構成了一個完整的電磁環境構建系統。這幾部分之間最主要的就是數據傳遞。
2.1 前操作板
前操控版選用的型號是STM32F103ZET6,使用的是ARM Cortex-M3內核,512 kB Flash,64KB RAM,LQFP 144腳封裝。完全符合作為前操控版的處理芯片。前操作板主要是由按鍵、GPS/BD模塊、RFID、OLED 顯示屏組成。前面操作板的主要作用就是按鍵輸入和顯示。通過按鍵輸入頻率、幅度等參數,通過OLED 屏幕顯示,并通過UART傳送給主控板。結構如圖2所示。

2.2 主控板
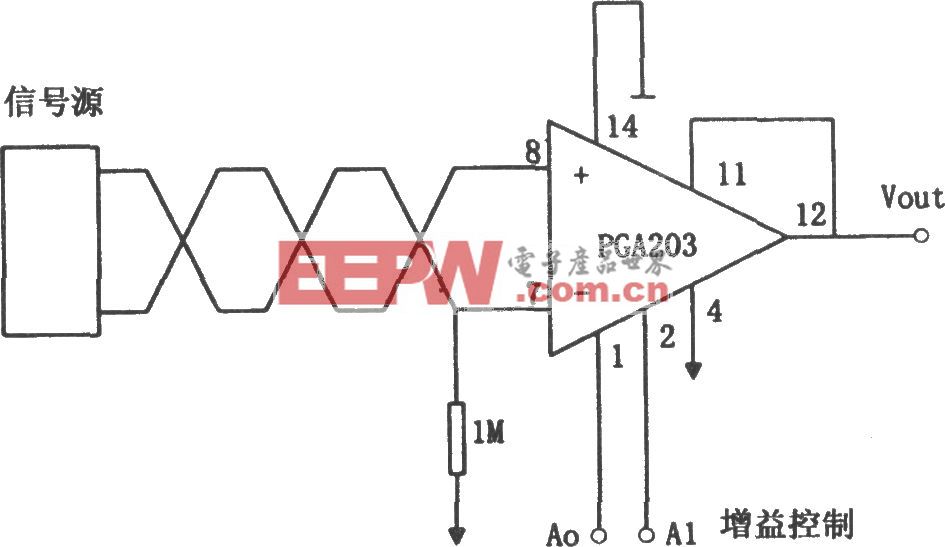
主控板是信號源的重要部分,選用的芯片是STM32F407ZGT6,帶有FPU 的ARM32 位 Cortex-M4處理器,1 MB的FLASH,192+4KB的SRAM,主頻為168 MHz。主控板主要由射頻模塊、功率放大器、電壓轉換模塊組成。當主控板接收到前操控版發送的數據時,將數據按照通信協議解析,在根據數據控制射頻模塊產生相應的信號,然后通過功放將信號放大,最后在通過天線發射出去。如圖3所示。

射頻模塊使用的是ADI公司生產的ADF4351,本電路為寬帶直接變頻發射機模擬部分的完整實現方案(模擬基帶輸入、RF輸出)。通過使用鎖相環(PLL)和寬帶集成電壓控制振蕩器(VCO),本電路支持500 MHz至4.4 GHz范圍內的RF頻率。對來自PLL本振(LO)進行諧波濾波,確保提供出色的正交精度、邊帶抑制和低EVM。
此芯片的性能基本完全符合本設計需求。故選用此芯片。
功率放大器選用的是ADI的HMC637BPM5E,此放大器工作頻率范圍為直流至6 GHz。提供15 dB的小信號增益,1 dB增益壓縮下的27.5 dBm輸出功率,40 dBm的典型輸出IP3和4 dB噪聲系數,同時需要來自12 V電源的335 mA 在VDD上。也是比較符合比設計的需求。故采用此芯片。
2.3 電源模塊
電源模塊以CN3763為芯片,進行電源的充電管理和供電使用。CN3763具有三種充電模式,即涓流、恒流和恒壓充電模式,是專門為鋰電池充電進行充電管理的電源芯片。
在恒壓充電模式下,芯片可以控制電池電壓為12.6 V,也可以通過一個外部電阻向上調整;在恒流充電模式,充電電流通過一個外部電阻設置。對于深度放電的鋰電池,當電池電壓低于恒壓充電電壓的66.5%(典型值)時,CN3763用所設置的恒流充電電流的17.5%對電池進行涓流充電。在恒壓充電階段,充電電流逐漸減小,當充電電流降低到恒流充電電流的16%時,充電結束。此芯片的功能基本完全符合本設計使用,故采用此芯片作為充電電源芯片。結構如圖4所示。

3 嵌入式軟件設計
本設計中嵌入式程序設計主要是指前操控版的的顯示程序,按鍵數據輸入程序,系統調試信息顯示程序以及給根據數據協議給主控板發送數據的程序。主控板的程序比較復雜,首先是與前面板的協議,協議主要是與前操作板的數據傳輸協議,就是把前操控版發送的數據解析成指令用來控制信號發生器和功放,發出按鍵輸入的信號。
3.1 前操作板嵌入式程序開發
前操作板主要是與主控板進行數據傳輸以及顯示系統調試信息等。系統初始化后,根據主控板通過UART發送給前操控板的數據會顯示相應的信息,如系統固件版本號,PCB版本號,設備別名,IP等信息。
定位是通過GPS/BD定位系統,系統初始化后,GPS/BD天線開始接收數據,并通過UART2將數據發送到前操控版,將接收到的數據按照協議解析后,通過OLED 屏幕顯示出來。
RFID模塊與GPS類似,系統初始化后,RFID就會正常工作,這時就可以進行打卡操作,將標簽卡放到前操控版處就可以實現打卡功能,并且可以查看打卡記錄的數據。
前操控板主要是進行按鍵輸入,顯示以及和主控板之間的數據傳輸。首先是按鍵輸入數據,系統初始化后,OLED 屏幕顯示出信號參數設置頻率、幅度、調試方式、射頻開啟狀態。用戶通過按鍵輸入這些參數后,MCU會把數據通過UART發送給主控板,主控板根據數據傳輸協議,將數據解析后,將會控制產生相應的頻率、幅度、調制方式的信號。
3.2 主控板嵌入式程序開發
主控板的嵌入式程序主要就是根據數據傳輸協議,將通過UART傳過來的數據解析,并根據解析出來的數據控制信號發生器產生相應信號,通過功放將信號放大,最后根據頻段將通過天線發射出去。在嵌入式程序中,數據協議是最關鍵的部分,只有通信雙方定好協議,數據才可以傳輸,傳輸完成后才可以按照協議解析數據。因此,編寫數據協議也是本設計的的難點。
傳輸的數據都是定義好的結構體,每一次數據傳輸都是將數據按照定義好的結構體的的結構傳輸的,所以,在解析協議時,也要按照定義好的結構體數據類型來解析數據,并且根據結構體的成員變量的數據來控制相應信號的產生。
4 主測試結果分析
整個系統設計基本完成后,進行整體測試,整機系統如圖5所示。

通過按鍵輸入頻率、幅度、調制方式等數據。例如,輸入信號參數,頻率110 MHz,幅度0 dBm,調制方式為CW,如圖6所示。

通過饋線將信號源輸出端與頻譜儀輸入端連接,為了保護頻譜儀,在輸入端加了一個10 dBm的衰減器。觀察其波形,如圖7所示。
本次測試使用的頻譜儀是Keysight N9918A。根據上圖分析可知頻譜儀接收到的信號是110 MHz,電平是-12 dBm,由于本次使用的饋線3 M長,所以損耗可以到達2 dBm,根據上圖可知,本信號源可以正常發射信號,且信號可以被頻譜儀正常接收。

5 結束語
本設計實現了通過按鍵輸入數據,經UART傳送到主控板,主控板根據傳輸協議將數據解析,并控制信號發生器產生相應頻率信號,經過功率放大器放大后,通過天線發射出來,經驗證,此信號源可以正常產生信號。
通過測試結果可知,本系統可以準確發射出輸入的按鍵信號,在允許范圍內精確度可能會有誤差。
參考文獻:
[1]周晗. 多制式射頻信號源關鍵技術研究[D].國防科學技術大學,2012.
[2]劉磊. 基于DDS的信號源設計及關鍵技術研究[D].南京理工大學,2013.
[3]譚營,許化龍,曲從善. 高精度智能信號源設計[J]. 計算機測量與控制,2007,(12):1852-1854.
[4]包靜,鄒鵬,趙海偉. 基于ARM的多功能信號源—顯示及接口模塊設計[J]. 硅谷,2013,6(10):20+25.
[5]張騰. 高精度正弦波信號源設計[D].西安工業大學,2014.
[6]許國宏,宋征,王耀磊. 多通道2ASK/2FSK信號源的設計與實現[J]. 電腦知識與技術,2016,12(07):257-259.
本文來源于《電子產品世界》2018年第11期第43頁,歡迎您寫論文時引用,并注明出處。






評論