基于WinCE的GPS數據采集系統設計

摘要:由于數據采集設備利用Windows桌面系統在戶外易受環境影響以及攜帶不方便等不足,設計采用ARM11處理器和WinCE 6.0操作系統作為硬件開發平臺,設計出一種基于ARM-WinCE 6.0的便攜式GPS數據采集系統,控制GPS模塊接收數據信息,實現對數據進行采集、提取、顯示、存儲。這對深入理解嵌入式系統應用和GPS在導航組合中應用具有一定的實用價值,有利于提高工作效率并為定位性能的評定提供依據。
關鍵詞:ARM11處理器;WinCE 6.0操作系統;GPS數據采集系統;導航組位
0 引言
GPS(Global Positioning System,全球衛星定位系統)以其高精度、全天候、全天時的特點,在定位、導航、測距、授時遙感等領域廣泛應用,并得到了快速的發展。對于在低功耗、高便攜性和高性能設備上實現GPS數據采集和分析技術也顯得越發重要。傳統的Windows桌面系統體積大,占用系統資源較多,也不利于野外作業,而基于嵌入式系統的ARM硬件平臺則具有體積小、功耗低、性能高等特點。WinCE系統作為嵌入式系統的一種類型,相對于Linux和Andriod系統,其開發難度要比后兩種系統要低,軟件調試也比較容易、靈活,并且WinCE系統類似桌面系統在軟件開發方面也較為便利。因此,在未來高性能的便攜式設備領域,WinCE系統的應用空間將十分巨大。
本文根據GPS信號接收原理及嵌入式技術,并遵循NMEA-0183協議,接收并解析GPS模塊的原始數據報文,設計出友好的人機界面環境,將系統所處的經度、緯度、高度、速度、日期時間等信息顯示出來,解決了人工記錄數據的不足,提高了工作效率,并為車輛運動參數估計提供了依據。
1 系統總體設計
GPS數據采集界面的設計采用面向對象的可編程技術,在Visual Studio 2005(VS 2005)編程環境下,運用C#語言實現。本設計采用飛凌公司研發的OK6410開發板,該開發板以ARM11內核架構為核心,并內嵌WinCE 6.0操作系統,硬件性能上能夠滿足對數據采集的需求。通過USB同步,完成PC機與ARM開發板之間的硬件平臺搭建,這樣就可以在PC機上進行應用程序的設計。
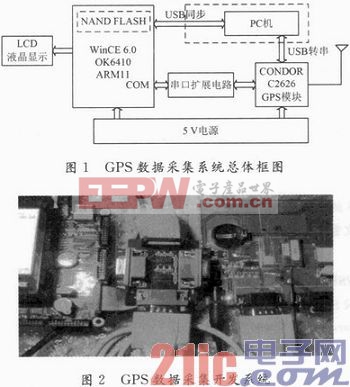
在VS 2005環境下,對設計完成的GPS數據采集應用程序進行編譯,并將編譯后生成的應用程序通過USB同步植入到ARM開發板的NAND FLA SH里。再通過串口擴展電路將ARM開發板與GPS模塊進行連接完成通信,然后運行NAND FLASH里GPS數據采集的應用程序,對GPS模塊接收來的數據進行采集、解析后送至外接的液晶,顯示其需要的信息,從而完成WinCE 6.0環境下GPS數據采集系統的設計。GPS數據采集系統總體框圖如圖1所示,GPS數據采集開發系統如圖2所示。
2 GPS協議分析及GPS數據數據格式
GPS數據遵循NMEA-0183協議,該數據標準是美國國家海洋電子協會(National Marine Electronics Association)所指定的標準規格。GPS接收機根據NMEA-0183協議的標準規范,將位置、速度等信息通過串口傳送到PC機、PDA等設備。NMEA-0183協議采用統一標準格式,輸出采用ASCII碼,數據傳輸以“語句”方式進行,每個語句均以“$”開頭,然后是兩個字母的“識別符”和三個字母的“語句名”,接著是以逗號分隔的數據體,語句末尾為校驗和,整條語句以回車換行符結束。
NMEA-0183的數據信息種類較多,而一組正常的GPS數據則包括$GPGGA,$GPRMC,$GPVTG,$GPGLL。$GPGGA輸出的是GPS的定位信息,$GPR MC則輸出GPS推薦的最短數據信息,$GPVTG輸出的是地面速度信息,$GPGLL輸出的是大地坐標信息。現以最常見的$GPRMC為例分析其數據格式格式如下:
$GPRMC,1>,2>,3>,4>,5>,6>,7>,8>,9>,10>,11>,12>*hhCR>LF>
1>為UTC時間,格式:hhmmss(時分秒);2>為定位狀態,A=數據可用,V=數據不可用;3>為緯度,格式:ddmm.mmmm(度分);4>為緯度區分,北半球(N)或南半球(S);5>為經度,格式:ddmm.mmmm(度分);6>為經度區分,東半球(E)或西半球(W);7>為地面速率(000.0~999.9節);8>為地面航向(000.0°~359.9°,以正北為參考基準);9>為UTC日期,格式:ddmmyy(年月日);10>為磁偏角(000.0°~180.0°);11>為磁偏角方向,E(東)或W(西);12>為模式指示。












評論