基于MFC和Vega的導航仿真系統


定義一個全局函數UINT runvegaproc(LPVOIDpParam)以此作為啟動Vega線程的入口,在此函數中加入線程的系統的初始化,系統定義,系統配置和vega線程的主循環和調用仿真模型的代碼等。
3 基于Vega海洋模塊模塊的程序設計
Vega海洋模塊提供API標準程序使得主程序能夠確認海浪高度,這樣當與用戶所提供的動態模型結合后,可使得相應的動態模型隨著海浪的波動而波動。在編寫以海洋模塊為基礎的應用程序時,需要在Mi―crosoft Visual C++6.O環境中包含其模塊中的“vgma―rine.h”頭文件并鏈接模塊中相應的庫文件到用戶的主程序中。當在Vega仿真程序中調用Vega海洋模塊時,需要調用vgInitMarine()和vgInitFx()對Vega海洋各模塊進行初始化,當調用vgConfigSys()時,配置海洋模塊。
4 慣性導航系統數學模型的研究
由于條件有限,這里沒有實際數據,一種辦法是模擬艦船的航跡,然后計算加速度計和陀螺的輸出,作為仿真的輸入,仿真結果與實際航跡比較,得到誤差曲線,慣導仿真框圖如圖3所示。
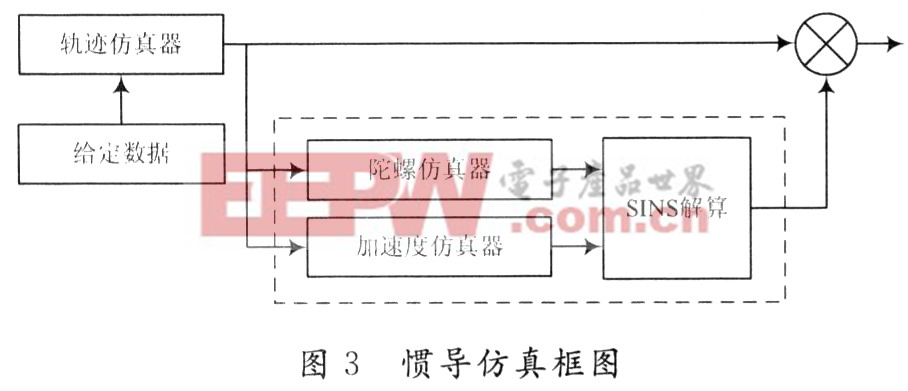
4.1 慣導仿真框圖
在真實的捷聯慣導系統中,ωbib和fb分別是由陀螺儀和加速度計提供的。由于條件的限制,在對捷聯慣導系統進行仿真時,首先建立陀螺儀仿真和加速度計的仿真器。
4.2 陀螺儀仿真器數學模型
(1)陀螺儀模型需要的輸入量。東向速度γtx、北向速度γty、當地緯度ψ、當地高度h;航向角ψ、俯仰角θ、橫滾角γ、x軸向角速率ωbtbx、y軸向角速率ωbtby,z軸向角速率ωbtbz。






評論