基于FPGA的空間目標碰撞預警系統

摘要:為了解決空間目標與航天器發生碰撞的問題,設計了一種基于FPGA,以在軌目標三維坐標為待處理數據進行快速并行處理的目標碰撞預警系統。該系統基于Xilinx公司FPGA芯片中的內容可尋址存儲器(Content Addressable Memory,CAM)IP核和MicroBlaze軟核控制器,利用嵌入式開發套件(EDK)進行搭建;并設計了空間危險目標的篩選算法,同時編寫了軟件及硬件代碼,加載到以上系統中進行實際的操作驗證。驗證結果表明,該系統實現了16個目標中危險目標的快速篩選功能,通過使用ChipScope邏輯分析工具進行波形分析,可知系統執行一次篩選操作所需時間為1.8 s。
關鍵詞:現場可編程門陣列;Microblaze;內容可尋址存儲器;空間目標;碰撞
隨著人類航天活動的不斷開展,空間碎片的空間密度已經對航天器安全造成了威脅,特別是近地軌道,碎片密度更大,且其數量仍在迅速增加,航天器遭受空間碎片撞擊事件時有發生。空間在軌目標數量不斷增加,對空間目標進行碰撞預警所需要的計算量也在迅速增加,鑒于并行計算速度很快,因此適合應用并行計算對危險目標進行篩選,進而進行預警操作。利用FPGA中的CAM(內容可尋址存儲器)和MicroBlaze軟核控制器可以實現危險目標的快速并行篩選。
1 CAM
1.1 CAM概述
CAM是一種特殊的存儲器,它是將數據項存儲在一個陣列中。每個數據項的位數叫作字寬,CAM中所有數據項的條數叫作CAM的深度。字寬和深度可以表征CAM的容量。
CAM基于內容尋址,通過硬件電路實現快速匹配。CAM的并行處理特性使得它在數據分選領域倍受青睞,被廣泛應用于以太網網址搜尋、數據壓縮、模式識別、高速緩存、高速數據處理、數據安全和數據加密等。
1.2 CAM工作原理
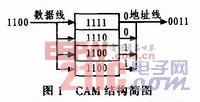
CAM最基本的兩個端口是數據線和地址線,數據線作為輸入端口,存放需要由CAM來處理的數據,而地址線作為輸出端口,輸出CAM的處理結果——匹配數據所在地址。圖1所示為深度為4、字寬為4的CAM,如果將二進制數1100放在數據線上,輸出的匹配結果將會是0011,如圖1所示,結果中的每一位二進制數對應CAM內部每一條數據,數據線上數據與CAM內部數據相等則對應位輸出為1,不相等則輸出為0。由于CAM具有并行匹配特性,所以很適合對空間多個目標進行同時并行匹配處理。
2 MicroBlaze軟核控制器
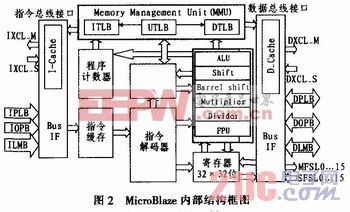
MicroBlaze是基于Xilinx公司FPGA的微處理器IP核,它和其他外設IP核一起可以完成可編程系統芯片(SOPC)的設計。MicroBlaze處理器采用RISC架構和哈佛結構的32位指令和數據總線,內部有32個32位寬度的通用寄存器;其內部結構圖如圖2所示。
使用Xilinx公司提供的EDK(嵌入式系統開發套件),可以在參數化的圖形界面下方便地完成嵌入式處理器系統的設計。其突出的優點:一是設計靈活性;二是可以整合用戶自定義IP核,使得算法可以在硬件中并行的執行而不是在軟件中串行的執行,從而極大地加速軟件的執行速度。










評論