指紋圖像預處理算法研究

摘 要:為了增強指紋圖像預處理的效果,在對現有算法深入研究的基礎上,提出一種新的指紋圖像增強算法。先利用Radon變換來獲得圖像的方向圖,然后利用方向濾波器對該圖像進行濾波,達到指紋圖像增強的目的。實驗結果表明,該算法使斷開的脊線得到連接,叉連線得到消除,脊線和谷線得到了分離。該算法與傳統方法相比,增強效果明顯,且算法簡單,為下一步指紋圖像識別奠定了堅實的基礎。
關鍵詞:Radon變換;紋線方向;方向圖;方向濾波器
0 引 言
在指紋采集的過程中,由于手指本身的因素和采集條件等各種原因的影響,采集到的原始指紋圖像中往往包含有很多噪聲,造成指紋圖像質量嚴重下降,模糊不清造成脊線的粘連或斷開,會導致產生虛假的指紋細節特征;遺漏或忽略了正確的細節特征點;在有關描述細節特征點提取的有效性和可信性,影響系統在匹配時的拒認率或誤認率,從而最終影響整個系統識別的結果。為了準確地進行細節點的提取和特征點的匹配,圖像就必須先經過預處理,消除噪聲、連接脊線斷裂部分,以得到紋線清晰的指紋圖像。可以說,預處理算法的好壞基本上決定了指紋識別系統的有效性和準確率。因此,指紋圖像增強在自動指紋識別系統中具有重要的地位和作用。
目前的指紋圖像增強算法大都是利用指紋的方向特性和頻率特性來對圖像進行濾波,以達到圖像增強的目的。但是在計算指紋圖像的方向圖和頻率圖時該類算法計算復雜。為此,這里提出了利用Radon變換來計算指紋圖像的方向圖,然后利用方向濾波器來對指紋圖像進行濾波的算法。實驗結果表明,該算法運行速度快、效果好,為下一步的指紋識別奠定了堅實的基礎。
l Radon變換及其實現
設函數f(x,y)∈L2(D)中,在平面上D區域中它平方可積,則f(x,y)的Radon變換g(t,θ)可表示如下:

其中:δ是沖擊函數,t-(xcosθ+ysinθ)=0表示極坐標下任意一條直線方程。
圖像的Radon變換就是將原始圖像變換為它在各個方向上的投影表示。圖像f(x,y)在任意角度θ上的投影定義為:

其中:

由投影切片定理知,Radon變換與Fourier變換有明確的對等關系。因此,離散的Radon變換可以由Fourier變換來實現。
2 算法原理
2.1 擴展像素值動態范圍
對圖像做局域動態范圍擴展,目的是消除圖像因為采集按壓力度不均勻而導致的局部灰度差別。在做過局域動態擴展之后,連續紋線上的灰度變化難免會變大,有必要做進一步的平滑。
(1)局域動態范圍擴展:使用一個滑動窗口遍歷整個指紋圖像,按照式(4)計算并重置窗口內像素的灰度。N(i,j)=F{[(O(i,j)一m2)/(m1一m2)]255} (4)其中:N(i,j)是窗口內處理之后的像素灰度值;O(i,j)是處理之前的像素灰度值;m1和m2分別是窗口內灰度最大和最小的像素值;F函數是用來取最接近結果的整數的函數。
(2)平滑處理:使用一個滑動窗口遍歷整個指紋圖像,對紋線上的灰度進行平滑。若該窗口內的灰度變化小于預設閾值M,則說明該窗口處于脊線或者谷線上,使用中值濾波對其進行平滑;若灰度變化大于預設閾值M,則說明該窗口處于脊線和谷線的分界線上,不做任何操作。
2.2 計算方向場
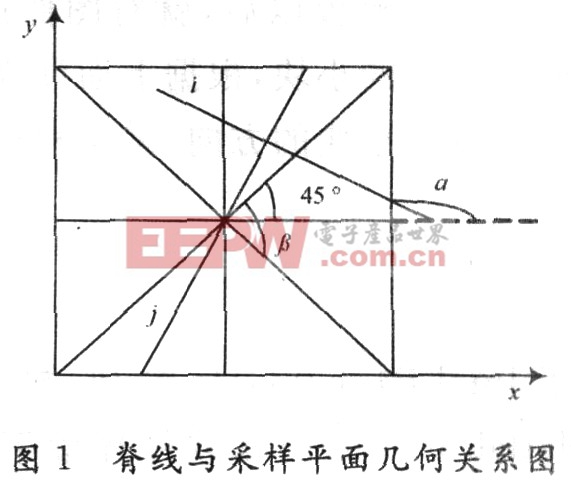
首先對均衡化后的圖像進行分塊,分塊大小為8×8或16×16,對每個圖像塊進行Radon變換,并且假設在圖像塊內的指紋脊線在幾何上具有互相平行的關系,也就是該分塊內的脊線具有相同的角度,實驗表明這種假設是合理的。又因為Radon變換就是將原始圖像變換為它在各個方向上的投影表示,所以在Radon域內,最大值的點所在的列就對應于一定的脊線方向,其關系如圖1所示。圖中脊線i表示圖像塊中的任意脊線,它與x軸的交角為α,此時第j條采樣直線與脊線i垂直,即在Radon域內最大值點所在的列為第j列。第j條采樣直線與采樣起始線的夾角為β,采樣直線從起始點開始沿順時針方向旋轉。





評論