基于GPS/INS實現某自行高炮導航系統的改造設計

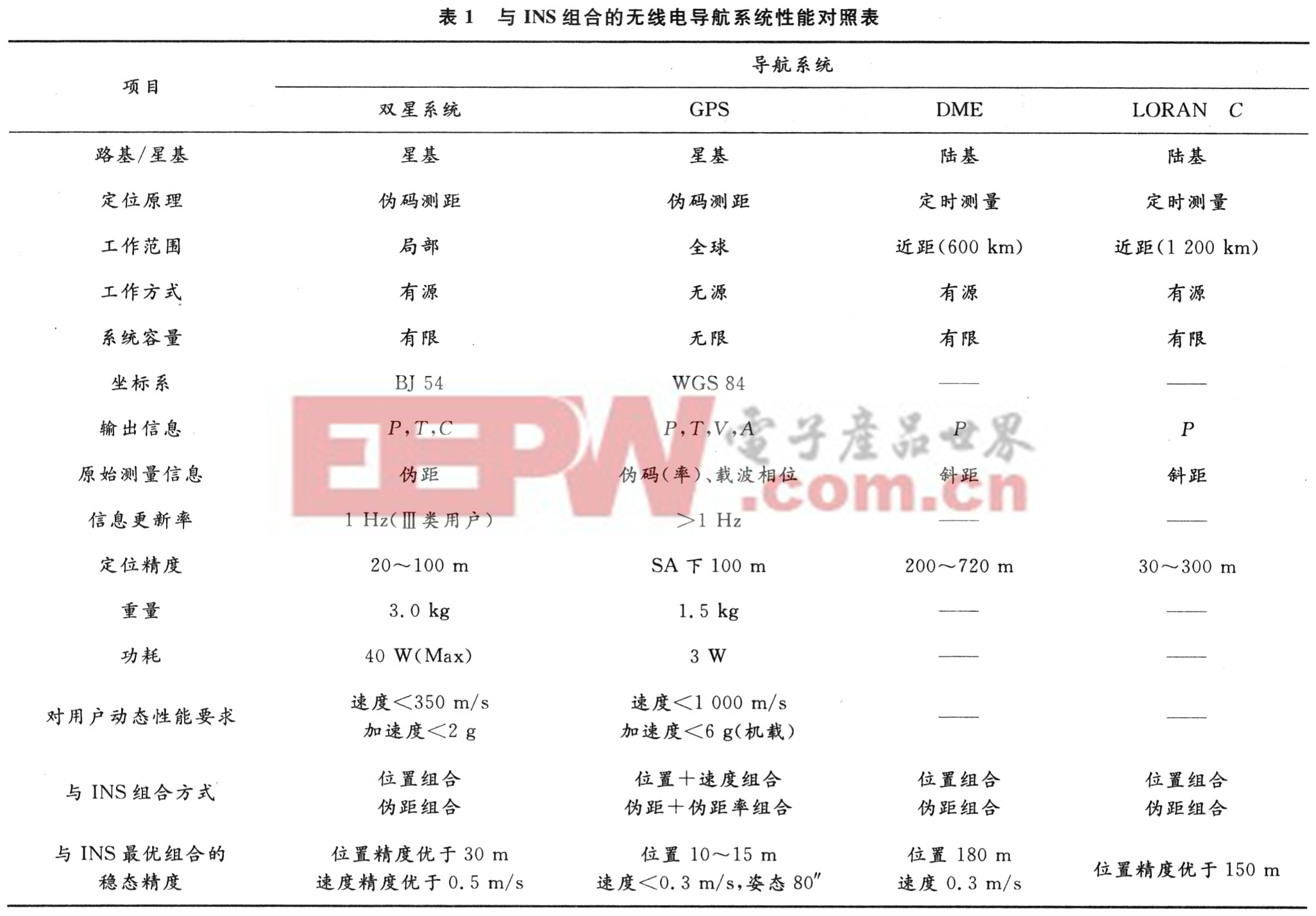
某自行高炮武器系統是我軍現役裝備,其通過INS(慣性導航系統)對戰斗車行軍作戰進行導航。INS是一種自主式導航系統,它不依賴外界信息即可獲得載體的姿態、速度和方位信息,抗干擾能力強,而且不向外界輻射電磁信息,隱蔽性好。但隨著時間的延續INS的定位誤差不斷積累,漂移變大。GPS廣泛用于地球表面移動目標的跟蹤定位,特別是在美國取消SA限制后,GPS可以高精度、實時、連續地實現導航,由于GPS是一種非自主導航系統,在動態環境下或受遮攔時容易出現“丟星”現象而導致定位中斷,抗干擾能力低,更新率不高。可以看出,INS和GPS具有很強的互補特性,將兩者結合起來將大大提高該武器系統的作戰效能。表1為與INS組合的幾種無線電導航系統的性能比較對照表。
1 INS工作原理
INS是通過IMU(慣性測量組件)測量載體相對慣性空間的角速度和加速度,并根據牛頓運動定律對其進行時域積分并轉換到導航坐標系中,從而推算出載體的瞬時速度、偏航角和位置等導航信息,如圖1所示。
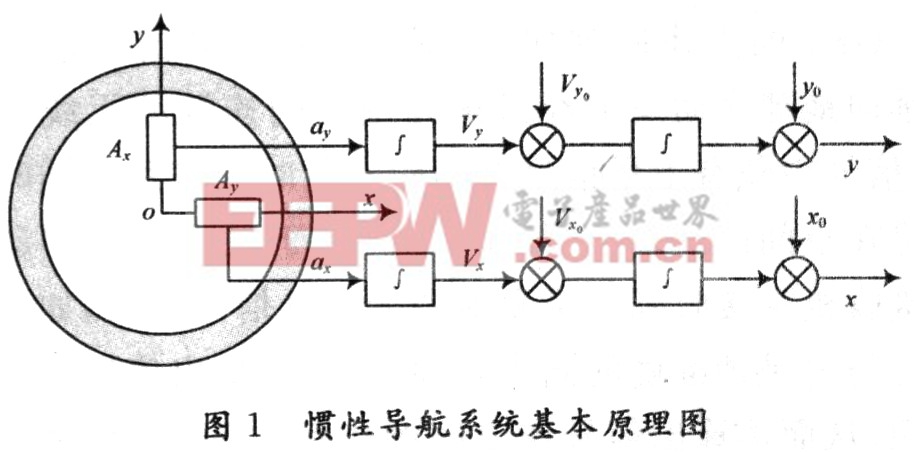
取xoy為定位坐標系,載體的瞬時位置為(x,y),如果在載體內用一個導航平臺把2個加速度計的測量軸分別穩定在x和y軸向,則加速度計分別測量載體,x和y軸的相對慣性空間的運動加速度,經導航計算機的運算得到載體的航行速度Vx,Vy,,故有:
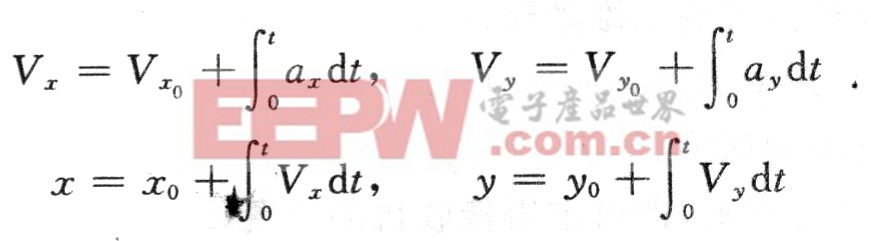
若經緯度為α,β,x正向為北,y正向為東,地球半徑為R,則用經緯度表示位置信息為:
![]()
注:P為位置;V為速度;T為時間;A為姿態;c為通信。
2 GPS工作原理
GPS的工作原理如下:圍繞地球運轉的人造衛星連續向地球表面發射經過編碼調制的連續波無線電信號,信號中載有衛星信號準確的發射時間以及不同時間衛星在空間的準確位置(星歷)。位于載位上的衛星導航接收機在接收到衛星發射的無線電信號之后,如果他們有與衛星鐘準確的同步時鐘,便能測量出信號的到達時間,從而估算出信號在空間的傳播時間,再利用這個傳播時間乘以信號在空間的傳播速度便能求出接收機與衛星之間的距離。即:
![]()
式中:R為衛星與接收機之間的距離;(x0,y0,z0)表示接收機位置的三維坐標;(x,y,z)表示衛星位置的三維坐標。其中R,(x,y,z)已知,(x0,y0,z0)未知。如果接收機能同時測出與三顆衛星的距離,則構成三個方程式,聯立求解,即可求得接收機的位置(x0,y0,z0)。
高精度的衛星導航系統地面接收裝置不斷跟蹤衛星,算出它們近期的準確軌道,并且不斷測量出衛星所載原子鐘的微小誤差,以使衛星播發的位置和時間一直保持著很高的精度。然而普通的接收機不可能有十分準確的時鐘,因此由它測出的衛星信號在空間的傳播時間不準確,進而導致接收機與衛星的距離不準確,這種距離叫做偽距(PR)。但是在接收衛星信號的瞬間,接收機的時鐘與衛星導航系統所用時鐘的時間差是一個定值,假設為△t,則式(1)改寫為:
![]()
如果接收機能測出距四顆星的偽距,聯立四個方程既能求解接收機的位置并告訴它準確的時間差。當載體不運動時,由于衛星在運動,接收到的衛星信號的載頻中會有多普勒頻移,這個頻移的大小和正負是根據衛星的星歷、時間以及載體本身的位置計算求得。然而如果載體本身運動,則這個多普勒頻移便要發生變化,其大小和正負取決于載體運動的速度和方向,根據這個變化,可以求得載體的三維運動速度。這樣,GPS就可以為用戶提供準確的三維位置、三維速度和時間信息。
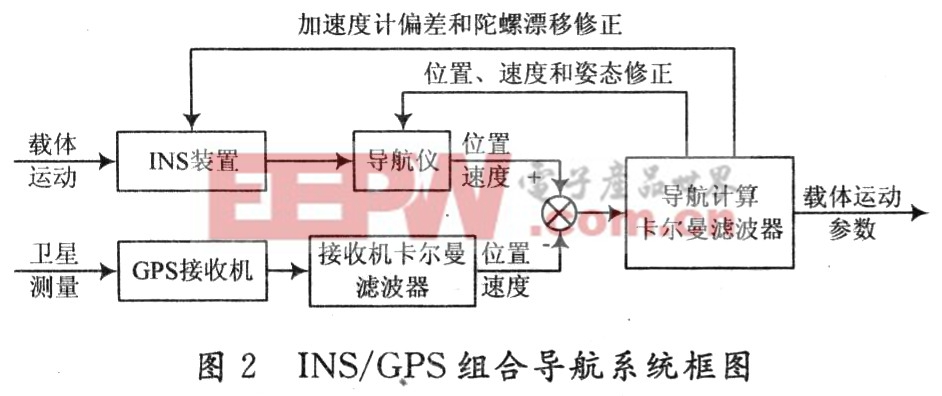
3 GPS/INS組合導航系統模型
組合導航系統的結構如圖2所示。














評論