基于Zigbee無線傳感器網絡定位問題的研究

1引言
本文引用地址:http://www.j9360.com/article/188870.htmZigbee技術已日益受到重視。這種以低成本、低功耗、低數據傳輸速率、低復雜度為顯著優點的短距離無線通信協議,滿足了小型、低成本的同定、便攜或移動設備無線聯網的要求。由于Zigbee的收發模塊體積小,功耗低,很容易直接安放在設備或工作人員的器械上,而且它們使用的是直序擴頻技術。具有很好的抗十擾能力,能獲得更遠的傳輸距離;此外,每個模塊都有接收強弱信號的指示功能(RSSI),易于直接觀察網絡信號的強弱;用該技術建立的無線網絡適合井下信息化管理系統的功能要求,通過使用覆蓋面積不同、功能不同的Zigbee網絡節點,可形成低成本的無線收發模塊,從而建立起一個適應信息化管理系統的井下無線局部網絡.并隨時掌握井下人員的動態分布。所以,越來越多的應用都已直接利用現成的Zigbee無線通訊模塊來測定節點位置。因此,在充分研究現有Zigbee技術的基礎上,主要對Zigbee無線傳感器網絡定位系統的通信沖突和定位精度進行分析,采用組團協議,提出一種選取團員的方法,使其更適合井下信息管理系統的要求。
2組團協議
井下信息化管理系統的具體實施方法是。在坑道中每隔幾十米放置一個傳感器節點,每個礦工身上也都佩帶一個這樣的節點,礦工身上佩帶的節點和坑道中放置的節點可以自行組成一個大規模的無線傳感器網絡。在礦井入口處放置一個具有網關功能的節點作為Sink節點,Sink節點連接傳感器網絡與Internet等外部網絡,實現兩種協議棧之間的通信協議轉換,同時發布監測中心的監測任務,并把收集的數據最后傳至監控中心,從而全面了解礦井人員的安全狀況。
但是,由于主巷道、人車、采掘工作面等人員較為密集,為了實時監控工作人員的位置信息,必須通過定位算法知道未知節點的位置。要求信標節點每隔一個不長的時間就廣播一次位置信息。此時,未知位置節點就要與信標節點進行一次通信傳遞,以確認信息并通過定位算法得到自己的位置信息,之后通過信標節點向監控中心報告自己的位置信息。如果兩個未知節點位置同時與信標節點進行通信就會造成信號沖突。然而Zigbee通信的退避機制有效地避免了這一狀況,它會事先進行沖突檢測,然后再發送信號。即使確實發生沖突,也有退避隨機時間重發的機制。不過如果未知節點位置的數量過多,當未知節點位置同時向信標節點發送位置信息時,因一直都能檢測到沖突信號,故無法發送。而且有些節點,即使在退避了一段時間之后再一次重發也會發生沖突。同時信息不斷地重發也浪費能量。最后終使網絡處于癱瘓狀態,無法進行通信。為了避免通信沖突和增強系統的功能性,可采用不讓每個未知節點位置都向信標節點發送信息,而只從中選出一個代表向信標節點發送信息。即采用組團協議解決這一問題。
3組團協議模型分析
組團協議的原理是將空間上相鄰的一群未知節點位置自行組成一個個團,并選出團長,推舉團長作為代表與信標節點進行通信,以減少未知位置節點與信標節點之間的通信量,消除沖突問題。圖1給出組團協議模型。
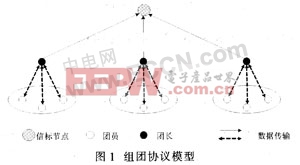 |
它不僅可以在人員密集時工作,也應能在人員稀疏的地方運行。當節點是一個孤立的節點時,該節點就是團長;如果有節點加入時,則要按照一定的算法選出一個團長,即并團。如果有節點離開時則要拆團,變成兩個,甚至更多的團。同時組團時還應考慮:
(1)單個節點也是團長。
(2)兩個或兩個以上的團當距離靠近時,要進行并團。為了減少復雜度,采用兩兩并團的原則。
(3)團長的選取。將最先接收到信號的節點作為團長,并團時最先接收信號的節點視為新團長。兩團合并后,團長必須清楚新團中的所有團員的ID,而新團的所有團員必須知道新團長的ID。
(4)團員的上限。應當對每個團的團員數做一個限定,例如限定30個團員。這樣也就帶來了并團的新問題。所以,雖然團員的上限是30,但存在一個過早飽和問題。可以通過數學辦法定出該過早飽和的上限,例如27人。當一個團的人數達到27人時,則認為接近飽和。
(5)團員的離開。團員離開時,要進行拆團。當有一個團員離團時,該團員便成為單獨的團長。當有幾個團員同時離開的時候,便視每個團員為單獨的新團長,讓其自己重新并團。并團也是要解決的問題,拆團在某種程度上可轉化成并團,使得協議的實現簡單可靠。
(6)節點的通信距離問題。應盡可能地減少通信次數,簡化通信幀的結構,爭取通過3次握手實現拼團。
4組團協議中團員選擇的研究
團長的選取是將最先接收到信號的節點作為團長,并團時則將最先接收信號的節點作為新團長。對于團員的選擇,可通過與團長的RSSI相似度進行選擇。若比團長的RSSI相似度高,則說明兩個傳感器節點的周圍環境相似,且位置相近,則成為團員,把這樣的一些團員組成一個團。組團以后。只有團長進行定位計算,得到的佗置坐標也為團員的位置。這樣的選擇在一定程度上可提高定位精度。
4.1方案設計
接收信號的強度RSSI是傳感器節點間通信時接收方一端的傳感器節點獲得通訊信號強度的一個量化值。RSSI值從客觀上能夠反映兩個傳感器節點周圍環境的相似情況。例如兩個傳感器節點在空間上相距很近,而且周圍環境相似(溫度、濕度、障礙物等),因此可能成為鄰居節點,而且接收到的信標節點信號強度RSSI也會接近。如圖2,傳感器節點A,B在空間距離上相距比較近,周圍情況也較相似,因此從所有鄰居節點接收到的信號強度RSSIA=[RA1,RA2,…,RAn],RSSIB=[RB1,RB2,…,RBn]也都較為相似。







評論