一種新型斷條光電自停裝置的設計

并條機斷條自停裝置(簡稱自停裝置)的可靠性直接影響并條機的產條質量,堵條、羅拉纏繞和積花(通稱為堵條)則會影響生產效率,甚至會損壞設備。因此對并條斷條、堵條的快速、準確檢測具有實際意義。早期的自停裝置為機械接觸式,因可靠性差、與棉條接觸和設備運行速度的提高等因素而逐步被淘汰,高架并條機已不采用,現在廣泛應用的是光電對射式自停裝置。并條機斷條自停裝置一般不具有堵條自停功能,存在易損壞、智能化程度低和調試應用不便的缺點,檢測單元的位置和角度稍有變化即會影響檢測的可靠性,造成漏檢和誤停車。隨著變頻器應用的增多,抗干擾能力弱的缺點也顯現出來。
光電自停裝置的工作原理與對射式光電接近傳感器的原理基本相同,一般采用紅外發射二極管發射某一頻率的紅外光,用光敏器件接收透射光并轉換為電信號,含有光路狀態信息的信號由放大器放大并經檢波,確定是否有物體經過光路。為提高可靠性,接收器件常用濾光封裝濾除自然光,避免光電轉換器件飽和;采用特定頻率的紅外調制光,抑制環境突變光干擾。隨著技術的進步,集成化、智能化的光電傳感器也不斷出現。但并條機應用的各種光電自停裝置一般不具有智能化檢測特點,集成化程度較低,光電轉換器大多采用光敏二極管或光敏三極管分離元件構成,接收器件僅完成光電信號轉換功能,信號放大和檢波需設計外圍電路支持,因此接收器件的性能是光電自停裝置電路設計的技術關鍵。為此,基于集成化IRM設計了一種新型智能化自停裝置,統一了并條機前后光電路設計,在FA302,FA306等型號的并條機上應用證明,其檢測可靠,避免了設備誤停。
1 自停裝置系統構成
1.1 系統構成與設計特點
如圖1所示,新型光電自停裝置由四路對射式光電斷條檢測單元、兩通道對射式光電堵條檢測單元和自停控制器構成。控制器具有雙控功能,斷條自停和堵條自停分別輸出,與檢測單元采用三總線連接,為檢測單元提供電源和接收停車信號。檢測單元由紅外線發射器和接收器組成,前后光電檢測單元的電路原理相同,因安裝方式不同其外觀尺寸有差別。發射器工作狀態受接收器控制,二者通過光路構成一個閉環檢測系統。為防止光路間相互干擾,發射與接收器均安裝光學透鏡系統,使發射光到達接收器的光斑直徑約為20 cm,因此,接收器具有較大的接收和調整范圍。

斷條檢測單元具有自動復位功能,檢測到斷條后輸出停車信號1 s即自動復位,當接收器持續接收不到光信號時間超過5 s,則發出故障指示,提醒維護。堵條檢測單元檢測到堵條故障,則持續輸出停車信號,防止啟動設備造成設備故障,堵條故障被排除后方能自動停止輸出停車信號。考慮電纜連接的可靠性與方便性,發射器和接收器采用電話水晶頭連接器與總線連接,安裝、更換方便。
1.2 檢測單元構成框圖
參見圖2,發射與接收單元雖是分體結構,但電路設計為一整體系統。主要由微處理器電路、動態光強控制電路、紅外發射電路、IRM接收電路及輸出電路構成,由控制器提供工作電源。微處理器作為智能控制單元,與動態光強控制電路、發射電路、IRM接收電路,通過光路構成一閉環控制系統,使發射與接收具有智能化檢測的特點。停車信號通過輸出電路送到自停控制器,控制設備停車。
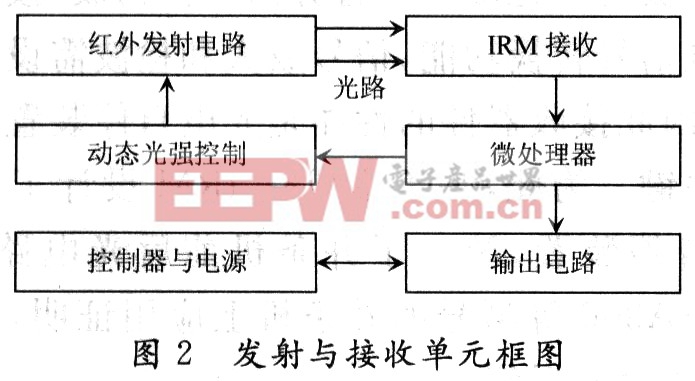
考慮到應用環境存在飛花、落塵和設備震動等因素,提出一種以微處理器為核心的檢測方案,采用在遙控領域應用廣泛的IRM作為檢測器件,簡化電路設計,提高穩定性;應用調制紅外光發射,排除環境光干擾;以發射、接收檢測反饋應答工作模式,提高檢測可靠性;利用智能化的可變光強發射技術,抑制因透鏡面落塵、發射器與接收器位置變化造成的誤檢測。應用證明在透鏡稍有落塵的情況下,檢測可靠。
2 自停裝置的電路設計與原理
2.1 IRM簡介與傳輸特性
IRM-3638型紅外遙控接收模組,將光探測器、前置放大器、檢波電路集成封裝在一起,以實現信號的接收、放大與檢波。無外圍元件,輸出與TTL和CMOS兼容,可直接與微處理器接口。具有可靠性高、抗干擾能力強、功耗低(2 mA@5 V)、靈敏度高的優點。
IRM適宜對波長為940 nm、調制頻率為38 kHz紅外脈沖信號的接收。當信號強度達到IRM的接收要求時,只需接收6個脈沖就能可靠觸發輸出低電平信號,如圖3所示。若IRM連續接收38 kHz的紅外脈沖信號,將持續輸出低電平;IRM接收不到符合要求的紅外信號時將輸出高電平。因此若物體經過或遮擋接收光路,IRM接收的將不是連續脈沖光或接收不到脈沖光,光電自停裝置的接收器正是利用了IRM這一檢波傳輸特性,微處理器通過檢測IRM的輸出狀態,可獲取光路的被遮擋的信息,并且自停裝置省掉了放大器和檢波電路設計,提高了系統穩定性。

2.2 動態光強控制紅外發射電路
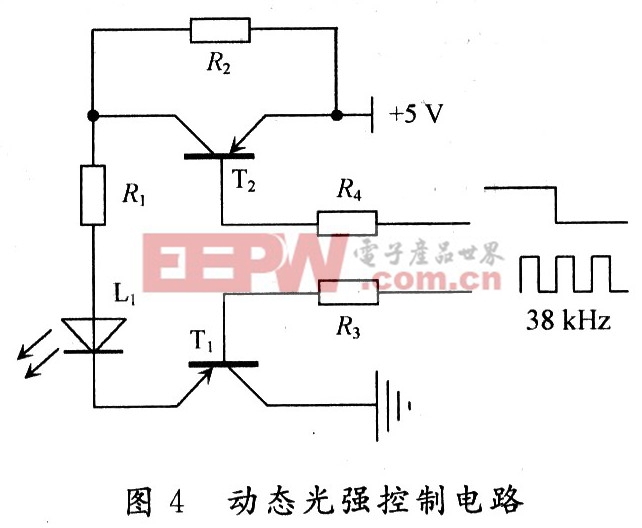
紅外線發射采用了動態可變光強設計,見圖4。L1為紅外發射二極管,T1,T2為PNP型三極管。當T2截止時,L1的限流電阻為R1+R2;T2飽和導通時短路R2,L1的限流電阻為R1,因此通過控制T2的導通狀態可控制通過L1的工作電流大小,實現光強控制。微控器通過T1以頻率為38 kHz、占空比為1/2的脈沖驅動紅外發射管L1產生脈沖紅外光。系統上電時微處理器控制T2截止,以小光強進行接收檢測,若能夠正常接收,系統將維持小光強發射進入工作狀態,以提高發射器壽命。若不能正常接收,T2將導通提高發射光強,這時若能正常接收,系統將以較大光強進入工作狀態,同時系統發出提示清潔透鏡或調整接收器位置的信號。若仍不能正常接收,則自動關閉接收器輸出,維持其他單元系統工作,并發出故障提示信號。這種設計方法,使發射與接收具有反饋應答特征,紅外發射光強度得到動態控制,使接收器自動適用接收狀態的變化,有利于提高檢測可靠性。
2.3 自停裝置單元電路原理
電路的信號處理和控制核心采用了Microchip Technology Inc.生產的PIC12C508A微處理器。它基于COMS設計,采用RISC結構,片內程序存儲器EPROM和數據存儲器RAM,并集成了上電復位電路(POR)、時鐘振蕩器(INTRC)、看門狗定時器(WDT)等功能單元。具有小型化封裝(8-Lead SIOC)、低功耗(2 mA@4 MHz)、高性價比的優點,為接收器的小型化設計提供了方便。自停裝置的電路設計充分利用了其內建功能,提高了集成度,降低了系統成本。
電路原理如圖5所示,圖中電阻R1,R2,R3,R4,紅外發射二極管L1、三極管T1,T2構成發射電路,由U1的GP4,GP5口輸出控制信號驅動。IRM3638、電阻R5、電容C2構成紅外接收電路,R5與C1的作用是與發射電路的電源隔離,防止信號串擾,穩定IRM的供電。電阻R6。、三極管T3構成輸出電路,為使各單元的輸出能夠采用線“或”式向自停控制器輸送停車信號,采用集電極開路(OC)輸出。L2為共陽極紅綠雙色LED,與R7,R8構成狀態指示電路,由U1的GP0,GP1口驅動。正常接收時顯示綠色;提醒清潔時顯示橙色;輸出停車信號時顯示紅色;接收故障時為橙色閃爍,可根據顯示狀態了解接收器工作情況。





評論