一種用于SVPWM技術中的死區補償方法

3 死區補償方法
由圖2e,f知,iA>0時,uAO'比MAO'*多出一系列負序脈沖,相當于下橋臂多作用了Td;iA0時,uAO'比uAO'*多出一系列正序脈沖,相當于上橋臂多作用了Td。死區補償就是根據當前相電流的極性對下一個PWM脈寬進行修正。
SVPWM方法通過調整每個扇區兩個相鄰非零電壓空間矢量和零矢量作用時間的長短合成所需的電壓空間矢量,以保證該矢量的軌跡為圓形。為易于闡述本方法,令圖1中上橋臂導通為1,下橋臂導通為0。電壓扇區的劃分如圖3所示。6個非零電壓空間矢量將逆變器的一個工作周期等分為6個區域。以iA>0,iB0,iC0時為例,在Td里,相當于A相橋臂的下橋臂多導通了Td,B相橋臂的上橋臂多導通了Td,C相橋臂的上橋臂多導通了Td,即由于死區的影響會使在該PWM周期內多出一個作用了Td時間的空間矢量(0 1 1),因此,要增加Td時間的空間矢量(1 0 0)來抵消這個多余的空間矢量。本文引用地址:http://www.j9360.com/article/175890.htm
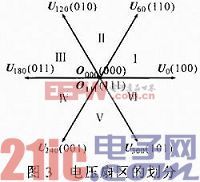
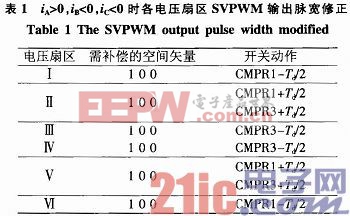
具體補償方法與電壓空間矢量所在的扇區、電流極性及需補償的空間矢量有關。下面根據圖3,給出iA>0,iB0,iC0時,電壓空間矢量位于6個不同扇區內的補償方法。分兩種情況討論:①在一個PWM周期里,與該電壓扇區相鄰的兩個非零電壓矢量中包含該需補償的電壓空間矢量,則直接在該電壓空間矢量的期望脈寬基礎上增加Td;②與該電壓扇區相鄰的兩個非零空間矢量不包含這個需補償的電壓空間矢量,則可通過這兩個非零電壓空間矢量與其余4個非零電壓空間矢量之間的位置關系推導出這個需補償的電壓空間矢量,從而在不改變每個電壓扇區內作用的原有電壓空間矢量前提下對相應的PWM脈寬進行修正。以下分別對這兩種情況進行具體說明:①當iA>0,iB0,iC0時,需補償的電壓空間矢量為(1 0 0),此時若電壓空間矢量位于I扇區,與該扇區相鄰兩個非零電壓空間矢量為(1 0 0)和(1 1 0),包含了該需補償的空間矢量,則僅需在電壓空間矢量(1 0 0)的期望脈寬上增加Td即可;②若電壓空間矢量位于Ⅱ扇區,而與該扇區相鄰的兩個非零電壓矢量為(0 1 0)和(1 1 0),不包含該需要補償的空間矢量。由圖3可知,電壓空間矢量(1 0 0)可由電壓空間矢量(1 1 0)和(1 0 1)合成得到,因此增加Td的電壓矢量(1 0 0)就相當于分別增加Td的(1 1 0)和(1 0 1),而增加Td的(1 0 1)相當于減少Td的(0 1 0),所以為了增加Td的電壓空間矢量(1 0 0)可通過減少Td的(0 1 0)和增加Td的(1 1 0)得到。同理得iA>0,iB0,iC0時,電壓空間矢量位于其他4個扇區的補償方法如表1所示。其中CMPR1,CMPR2,CMPR3為TMS320LF2407A型DSP的3個比較寄存器值,且采用增減計數方式。根據其余5種電流極性,死區補償共36種情況,可依據上述方法具體導出。由表1可見,所述方法大多情況下每個PWM周期僅需對一個橋臂的PWM脈寬進行修正,少數情況下要對兩個橋
臂的PWM脈寬進行修正,從而削弱了誤補償隨時間積累所產生的影響,減少了CPU運行時間。
4 電流極性的判斷
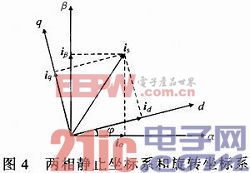
綜上所述,此處所述方法基于電流極性的判斷,但通過檢測得來的三相電流判斷極性在過零點附近容易出現偏差,造成誤補償。故可先通過坐標變換將電流從三相靜止坐標系變換到同步旋轉坐標系下。在直流情況下,用一階低通濾波器進行濾波,因為濾波不會引起相位上的滯后,然后將濾波后的直流分量反變換到兩相靜止坐標系下,最后根據兩相靜止坐標系下的iα和iβ來判斷電流的極性。其中定子電流在兩相靜止坐標系的分量iα,iβ與兩相旋轉坐標系的分量iα,iβ間關系如圖4所示,φ為旋轉變換的變換角。

逆變器相關文章:逆變器原理
pwm相關文章:pwm是什么
逆變器相關文章:逆變器工作原理
低通濾波器相關文章:低通濾波器原理
脈寬調制相關文章:脈寬調制原理 矢量控制相關文章:矢量控制原理 鎖相環相關文章:鎖相環原理


評論