智能化海豚動力電源設計

摘要:為解決對海洋探測和海洋環境污染實時監測的電源問題,通過把微型水力發電機系于海豚身上,隨著海豚運動時海水的反作用力驅動水力機轉動發電,經整流濾波穩壓后給鋰電池板充電,從而海洋探測和海洋環境污染監測時可以使儀器獲得穩定的電源。利用壓力傳感器、單片機、電磁控制和無線傳輸網絡,增加該智能化海豚動力電源的可靠性和實用性,實現對儀器的回收和避免儀器對海洋環境的污染。
關鍵詞:海豚;微型水力發電機;壓力傳感器;電源設計
人們一直都在不斷地探索海底世界,保護海洋珍稀動物和人類賴以生存的海洋環境。由潛水員攜帶攝像潛入水下對海底世界進行拍攝。但潛水員在水下的活動時間和深度非常有限,對極為豐富的海豚和遼闊的海底世界獲取的資料是微不足道的。另外由于海洋面積占地球面積的79%,開發利用海洋為人類經濟建設服務,使海洋的經濟開發利用和保護海洋動物與海洋環境和諧發展,必須對海洋環境參數進行實時監測,儀器的長期供電成為一個極大的難題。把監測儀器與海豚動力電源集成于一體,一同系于海洋動物身上,利用海豚的運動和海水的反作用力,使系在海豚身上的微型發電機轉動發電,經DC—AC轉換和給電池板BH充電,獲得穩恒直流電源。實現了對海洋環境參數進行實時監測,對加強保護海豚動物和海洋環境,對海洋的持續開發利用都具有極其重大意義。
1 海豚動力電源
1.1 海豚動力電源的組成
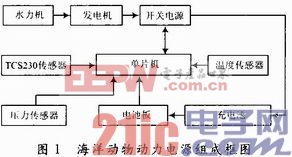
為了使海豚原地不動時,發電系統能照樣有電能供給儀器進行實時監測,而不遺漏關鍵數據和關鍵的圖片采集。因此,海豚動力發電系統是由水力機、發電機、開關電源、充電器、電池板和防水附件等組成,其組成框圖,如圖1所示。
1.2 海豚動力水力發電機組的結構
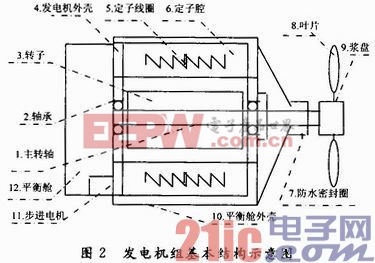
由于發電機組是系在海豚身上,利用它們的運動,由海水的反作用力驅動水輪機轉動,水力機再驅動發電機轉動發電。由于海豚的運動速度范圍為0~70 km,沒有固定速度值,而發電機不得超過額定值工作。因此發電機上安裝有一個限速電路,保證發電機安全運行;由于海豚的運動范圍離水面為0~450 m。因此,防水密封的性能要求比較高,必須增加防海水滲漏,以免產生繞組線圈短路燒毀電機。為了使運載電源的海豚一感受到有外加重物系于它身上,產生不適的負擔,增加一平衡艙,通過調節其體積,使浮力等于重力。整個海豚動力水力發電機組的結構示意圖,如圖2所示。
1.3 水力機工作基本原理
該研究的水力機不同于傳統的水輪機,也不同于輪船上的螺旋槳,而是象風力發電的風機。傳統的風機是依靠風力推動風機轉動,該水力機是利用海水產生的相對運動,使水力機獲得海水的反作用力而轉動的。設帶水力機的海豚前進速率為v(單位:ms-1),水力機葉片的長為L,距水力機一定距離的上游相對海水流速為V1(單位:ms-1),距水力機遠處的下游海水相對速度為V2(單位:ms-1),海水通過水力機水輪時的實際相對速度為V(單位:ms-1),由文獻的方法推導得,作用在水輪上的力和提供的功率分別為:
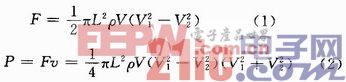
式中:ρ為海水密度(單位:kg/m3);V=(V1+V2)/2。






評論