基于LCL濾波的光伏逆變器網側電流單環控制

摘要:在光伏并網逆變器系統中,LCL濾波器相比單L濾波器具有更優的濾波性能,但其引入了諧振點,降低了系統穩定性。在不增加額外無源阻尼和傳感器的基礎上,提出采用網側電流單環控制策略,利用數字控制過程中的延遲環節實現了系統的穩定控制。給出延遲環節的設計方法,實現了系統良好的并網諧波特性和動態特性,最后通過實驗驗證了控制策略的有效性。
關鍵詞:逆變器;光伏并網;濾波器;單環控制
1 引言
光伏發電技術近年來發展十分迅速,其中并網逆變器是光伏發電系統的重要組成部分,逆變器通過L或LCL濾波器與電網連接。LCL濾波器由于具有更佳的濾波性能,逐步代替單L濾波器在工業中得到了廣泛應用。然而LCL濾波器由于存在諧振峰,給系統帶來不穩定因素。目前有許多方法來解決此問題,可分為無源阻尼、有源阻尼和無阻尼方案三大類。
無源阻尼方案通過在LCL濾波器上加入無源電阻,實現對諧振峰的阻尼作用。然而無源阻尼帶來了額外損耗;有源阻尼方案通過控制實現阻尼作用,避免了引入額外損耗。然而有源阻尼方案通常需使用多個系統狀態變量來實現,需要額外的傳感器,即使采用觀測估算的方法來間接獲得其他狀態變量,也對系統參數敏感性較強。文獻考慮數字控制本身存在延遲,用網側電流單環控制實現了系統的穩定,是一種無阻尼方案。該方案無需額外的無源器件和傳感器,控制簡單,然而該文獻沒有分析延遲環節如何實現系統穩定,也沒有給出延遲環節的設計方法。這里詳細分析了延遲環節對系統穩定性的影響,確定保證系統穩定的延遲時間的范圍。并分析延遲環節對系統穩態和動態特性的影響,給出一種設計方法,實現了系統良好的動穩態特性。
2 系統描述
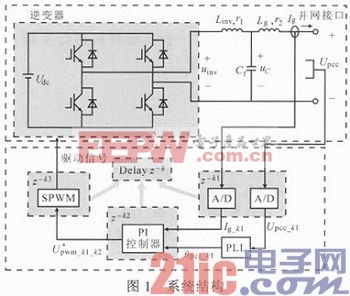
圖1示出單相光伏并網逆變器系統結構圖,系統參數:LCL濾波器中,Linv=0.6 mH,Cf=5μF,Lg=0.6 mH;電網電壓有效值Ug=220 V,f0=50 Hz;直流電壓Udc=400 V;控制頻率fc=16 kHz;控制參數Kp=10.56,Ki=18700。LCL濾波器諧振頻率4 110 Hz,前后級等效串聯電阻約為0.1 Ω.采用雙極性SPWM,控制和開關頻率均為16 kHz。控制器采用傳統PI控制,參數設計方法采用對稱最佳法進行設計。數字控制中的延遲環節用z-k來表示k拍的延遲,主要是由A/D轉換時間,控制延遲和PWM波生成過程的延時構成。其中控制延遲可進行靈活的設計來實現對延遲時間的調節。
3 延遲環節的影響分析和設計
3.1 穩定性分析
LCL濾波器由于存在諧振峰會帶來系統不穩定的問題。圖2a中實線表示不考慮延遲影響時系統的開環波特圖。可見,在諧振峰處,系統增益遠大于零,且相角正好穿越-180°。則在該頻率點系統存在一個正反饋效應,諧振點處信號會被無限放大而導致系統失穩。虛線表示延遲時間為1拍的系統波特圖,可見延遲環節不會對幅值增益帶來任何影響,故不會對諧振峰起到阻尼作用,然而會對相角特性產生影響。由圖2a可見,延遲1拍可改變原開環系統-180°的穿越點,使該點前移到幅值增益為負的區域,從而破壞原系統的正反饋效應,保證系統穩定運行。對于任意的LCL并網逆變系統而言,要保證系統穩定,需設計延遲環節,使系統-180°穿越點發生在圖2a所示的ωcut和ω1之間,且在ω2點系統相角大于-540°。定義3個相角裕度PMcut,PM1和PM2:








評論