基于虛擬空間矢量的中點電壓平衡控制

摘要:基于傳統算法的二極管箝位型三電平逆變器,在高調制度及低功率因數下存在中點電壓不可控區域,中點電壓中存在3倍基波頻率的低頻紋波信號,嚴重時將導致系統無法正常工作。針對此問題,在分析該不可控區域存在原因的基礎上,研究了虛擬空間矢量與平衡因子法相結合的十段式對稱模式,有效實現了中點電壓的全范圍可控,并能消除因電容不平衡等因素造成的中點電壓偏移,具有較好的魯棒性。仿真及實驗驗證了該方案的正確性與有效性。
關鍵詞:逆變器;中點電壓;不可控區域;虛擬空間矢量
1 引言
三電平中點箝位型逆變器具有等效開關頻率高、輸出波形正弦、單管耐壓低等優點,在中、高壓大功率場合應用廣泛,中點電壓平衡是影響其控制性能的重要因素。近年來,國內外學者提出一系列中點電壓平衡方案,文獻在傳統兩電平空間矢量脈寬調制(SVPWM)的基礎上,提出了基于參考電壓矢量分解的算法;文獻提出了基于非正交坐標系的簡化SVPWM算法,但該方法在調制度較高或功率因數較低時,單純采用小矢量對中點電壓控制將出現不可控區域。
為在高調制度和低功率因數下有效控制中點電壓,并解決因電容不一致或開關管延時等原因造成的中點電壓偏移,此處在討論中點電壓波動原因的基礎上,利用虛擬空間矢量,并結合精確調節因子方法,消除了中矢量對中點電位的影響,實現了中點電壓的全范圍控制。
2 傳統SVPWM及其對中點電壓的控制
傳統SVPWM算法根據參考電壓矢量的幅值和方向判斷其所處區域,選擇其最近的3個基本矢量進行合成,再根據伏秒平衡原理計算各基本矢量的作用時間,生成所需的PWM波。
根據基本矢量的模長和對中點電壓的影響,可將其分為大、中、正負小和零矢量。由于中矢量對中點電壓不可控,當調制度較高或功率因數較低時,無功分量比重較大,通過調節小矢量無法完全抵消由中矢量引起的中點電壓波動,存在不可控區域,文獻給出不可控區域的數學表達式。
3 虛擬空間矢量
3.1 虛擬矢量原理
考慮三相平衡,即ia+ib+ic=0。設計虛擬矢量的原則為虛擬矢量的中點電流為零,使其對中點電壓無影響。以中矢量Vpon為例,因其對應的中點電流ib(t)通常不為零,且隨時間變化,會對中點電壓造成不可控影響。在一個采樣周期內,在原本的中矢量上加入相鄰的兩個小矢量vonn,vppo(對應中點電流分別為ia和ic),令三者作用時間相同,用此虛擬矢量代替原來的中矢量則可消除中矢量對中點電壓的影響。虛擬中矢量vVM1=(vonn+vpon+vppo)/3。采用虛擬中矢量代替原來的中矢量后,一個扇區被分成了5個小區域,如圖1所示。

3.2 計算作用時間
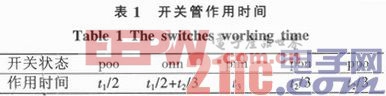
以圖1參考電壓矢量為例,可計算出相鄰3個基本矢量的作用時間。設小矢量的作用時間為t1,虛擬中矢量的作用時間為t2,大矢量的作用時間為t3,則各開關管的開通時間如表1所示。
3.3 中點電壓平衡控制
采用虛擬中矢量的控制算法,理論上可消除中矢量對中點電壓的影響,較好地控制中點電壓平衡,但無法控制中點電壓原本就有偏移時的情況;此外,虛擬空間矢量是在三相平衡的前提下提出的,當三相負載不平衡時,并不能消除中矢量對中點電壓的影響。為解決這一問題,在虛擬矢量的基礎上加入精確中點平衡因子。
造成中點電壓偏離零點的原因是一個周期內流入中點的電荷不為零,故直流側中點電位平衡問題可通過控制流入中點的電荷來實現。
三相負載平衡時,在圖2參考矢量所在小區域中,中矢量對應中點電流為ia+ib+ic=0,設正負小矢量作用時間分別為tp=(1+f)t1/2,tn=(1-f)t1/2,通過調節tp,tn即可控制中點電壓而不改變輸出電壓。
一個周期內,流入中點的電荷量為:
![]()
設上、下兩電容原有電壓分別為U1和U2,令流入中點的電荷與兩電容原有電荷差△Q=Cd(U2-U1)相抵消,即可使中點電壓為零,從而控制中點電壓,求出平衡因子:
f=-Cd(U2-U1)/(t1ia) (2)

逆變器相關文章:逆變器原理
模擬信號相關文章:什么是模擬信號
dc相關文章:dc是什么
逆變器相關文章:逆變器工作原理
電荷放大器相關文章:電荷放大器原理 脈寬調制相關文章:脈寬調制原理 矢量控制相關文章:矢量控制原理


評論