一種分布式電池管理系統的設計和實現

蓄電池技術是下一代汽車--電動汽車的核心技術之一。蓄電池是復雜的電化學系統,國內外對電池管理技術都進行了大量的研究,取得了許多成果。一般認為電池管理系統主要有如下功能:電池狀態參數采集(包括溫度、電壓、電流等);電池荷電狀態(State of charge,SOC)的準確估計;不健康電池的早期診斷;對電池組安全運行全面監控,如防止電池的過充電和過放電等等。由于電動汽車蓄電池組通常是由幾十個(上百個)單體電池組成,所以,每一個單體電池的工作狀態正常與否不僅反映電池組性能的好壞,而且影響電池組的容量及剩余能量。實踐表明,在電動汽車運行過程中,如不及時檢測,找出老化電池給予調整,電池組的容量將變小,壽命將縮短,影響整個電池組的高效安全運行。電池工作狀態的檢測由電池管理系統(Battery Management System,BMS)完成,而電池管理系統的其他功能(包括剩余能量的計算)都是建立在電池工作狀態檢測的基礎之上的。
本文引用地址:http://www.j9360.com/article/174945.htm分布式結構的管理系統
1系統結構
系統要實現不同類型的多種功能,集中的或中央處理方式無法滿足安全性要求,自然要采用分布式結構;系統的工作環境惡劣,常處于強電磁干擾及脈沖電流的干擾下,為了確保可靠性,考慮采用和發展了高性能CAN現場總線作為通訊系統;而且CAN總線在汽車上已使用很久,具有很強的抗干擾性,同時該技術比較成熟,已成為汽車使用通訊的標準。因此,在系統的內部通訊以及跟外部通訊都采用CAN總線來實現。
本分布系統是以CPU80C552為公用模塊平臺來設計的,由于CPU存儲空間及運算的有限性,必須采用多CPU來分別實現管理系統所需的各種功能。完成的基本系統由四個模塊并行組成:數據采集、均衡充電、電量估計及通訊顯示;各個模塊分別實現其功能,通過CAN總線進行數據通訊,能夠實現單電池電壓、總電壓、充放電電流、溫度的采集和測量,電量估算。同時,系統還具有很強的擴展性,可以進行具體的電池診斷和電池安全性能保護等功能的研究和開發。在鋰電池的管理系統中,108只電池采用9塊測量主板,再加上4塊基本板,共計13塊板。

圖1電池管理系總體結構圖
2管理系統主模塊的設計
系統的主要功能包括數據采集、電量估計及顯示診斷等。由于80C552具有8路10位A/D轉換的功能,因此,采集模塊先采用線性光耦法測量單電池的電壓,通過其4個A/D口將模擬量轉換為數字量存入存儲器,溫度測量采用單總線技術,使用Dallas數字芯片來測量溫度,該芯片具有12位的精度等級,能非常準確地測量到系統的溫度。總電壓、電流信號通過特殊的傳感器將其信號轉換為0~10V的信號,通過14位的A/D轉換器件轉換為數字量存入系統。
通訊及顯示模塊提供了雙CAN通訊接口,能夠與系統內各個模塊及外部整車系統通過CAN進行數據傳輸;同時系統提供RS232接口,能夠實現與PC機通訊;模塊還提供5口寸半液晶顯示驅動功能,和按鍵進行人機友好操作;模塊還設有電壓、電量、電流及溫度的上下限報警及自檢功能,保證系統的安全性。
各個系統模塊的基本結構框圖如圖2所示。
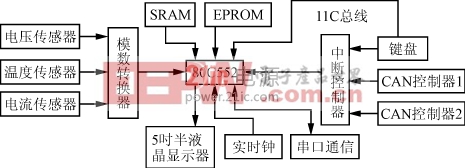
圖2模塊結構框圖
3電量估算
電量估算采用實時電流積分的安時法進行基本估算,然后通過對影響電池電量的溫度、自放電及老化等各種參數進行修正,并考慮單塊電池間的不一致性,從而得到精確的電池組電量。
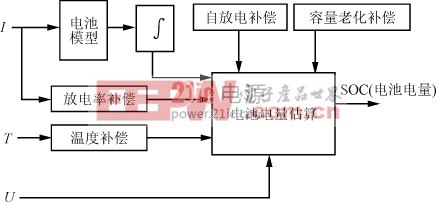
圖3電池電量估算框圖
CAN總線系統
1CAN簡介
CAN是控制器局域網絡(Controller Area Network, CAN)的簡稱,是由研發和生產汽車電子產品著稱的德國BOSCH公司開發了的,并最終成為國際標準(ISO118?8)。是國際上應用最廣泛的現場總線之一。 在北美和西歐,CAN總線協議已經成為汽車計算機控制系統和嵌入式工業控制局域網的標準總線,并且擁有以CAN為底層協議專為大型貨車和重工機械車輛設計的J1939協議。近年來,其所具有的高可靠性和良好的錯誤檢測能力受到重視,被廣泛應用于汽車計算機控制系統和環境溫度惡劣、電磁輻射強和振動大的工業環境。
CAN總線特點
CAN總線是德國BOSCH公司從80年代初為解決現代汽車中眾多的控制與測試儀器之間的數據交換而開發的一種串行數據通信協議,它是一種多主總線,通信介質可以是雙絞線、同軸電纜或光導纖維。通信速率可達1MBPS.
完成對通信數據的成幀處理
CAN總線通信接口中集成了CAN協議的物理層和數據鏈路層功能,可完成對通信數據的成幀處理,包括位填充、數據塊編碼、循環冗余檢驗、優先級判別等項工作。
使網絡內的節點個數在理論上不受限制
CAN協議的一個最大特點是廢除了傳統的站地址編碼,而代之以對通信數據塊進行編碼。采用這種方法的優點可使網絡內的節點個數在理論上不受限制,數據塊的標識碼可由11位或29位二進制數組成,因此可以定義2或2個不同的數據塊,這種按數據塊編碼的方式,還可使不同的節點同時接收到相同的數據,這一點在分布式控制系統中非常有用。數據段長度最多為8個字節,可滿足通常工業領域中控制命令、工作狀態及測試數據的一般要求。同時,8個字節不會占用總線時間過長,從而保證了通信的實時性。CAN協議采用CRC檢驗并可提供相應的錯誤處理功能,保證了數據通信的可靠性。CAN卓越的特性、極高的可靠性和獨特的設計,特別適合工業過程監控設備的互連,因此,越來越受到工業界的重視,并已公認為最有前途的現場總線之一。
可在各節點之間實現自由通信
CAN總線采用了多主競爭式總線結構,具有多主站運行和分散仲裁的串行總線以及廣播通信的特點。CAN總線上任意節點可在任意時刻主動地向網絡上其它節點發送信息而不分主次,因此可在各節點之間實現自由通信。CAN總線協議已被國際標準化組織認證,技術比較成熟,控制的芯片已經商品化,性價比高,特別適用于分布式測控系統之間的數通訊。CAN總線插卡可以任意插在PC AT XT兼容機上,方便地構成分布式監控系統。
結構簡單
只有2根線與外部相連,并且內部集成了錯誤探測和管理模塊。
2CAN總線設計
CAN總線總體結構如圖4所示,在總線的兩端配置了兩個120Ω的電阻,其作用是總線匹配阻抗,可以增加總線傳輸的穩定性和抗干擾能力,減少數據傳輸中的出錯率。CAN總線節點結構一般分為兩類:一類采用CAN適配卡與PC機相連,實現上位機與CAN總線的通訊;另一類則是由單片機、CAN控制器及CAN驅動器構成,作為一類節點與CAN總線進行數據傳輸。在本系統中,CAN控制器采用Philips公司生產的SJA1000和82C200,它作為一個發送、接受緩沖器,實現主控制器和總線之間的數據傳輸;CAN收發器采用PCA82C250芯片,它是CAN控制器和物理總線的接口,主要可以提供對總線的差動發送能力和對CAN控制器的差動接受能力。

評論