基于ATmega48的三相無刷電機控制方法

無刷直流電機以其重量輕,體積小,加速性能好,運行平穩,噪音低等優點而廣泛用于丁業和民用產品中。無刷直流電機的功率因數高,無轉子損耗,其轉子轉速能嚴格地與電源頻率保持同步。轉子磁場由永久磁鐵產生。通常,采用電壓源型脈寬調制(PWM)控制作為無刷直流電機調速系統用的驅動器。近年來,國外紛紛推出以單片機(MCU)為核心的單片電機控制器,它南一個MCU再配備外圍驅動電路構成,能大大降低成本,縮小體積,緊湊結構,提高可靠性。在此,介紹r采用Atmega48單片機實現三相無刷直流電機控制器的方法。
2 ATmega48單片機
ATmega48單片機是Atmel公司基于自動電壓調整器(Automatic Voltage Regulator,簡稱AVR)增強型精簡指令集計算機(RISC)結構的低功耗8位CMOS微控制器。具有先進的指令集及單時鐘周期指令執行時間,其數據吞吐率可以達到1 MIPS/MHz。AVR內核具有豐富的指令集和32個通用工作寄存器。這些寄存器都直接與算術邏輯單元(ALU)相連接.可在一個時鐘周期內通過一條指令同時訪問兩個獨立的寄存器,因此可提高代碼效率。
ATmega48的硬件資源有:4 KB的系統內可編程Flash:256字節的EEPROM:512字節的SRAM;23個通用I/0口線;32個通用工作寄存器;2個帶獨立預分頻器和比較器的8位定時器/計數器;1個帶預分頻器、比較器和捕捉功能的16位定時器/計數器;帶獨立振蕩器的實時計數器;6個通道PwM;8路10位A/D轉換器;6路10位A/D轉換器;可編程的串行USART接口;可工作于主機/從機模式的SPI串行接口;面向字節的2線串行接口;獨立片內振蕩器的可編程看門狗定時器;片內模擬比較器及5種可通過軟件選擇的省電模式。ATmega48具有豐富的I/0口、A/D轉換器、定時器/計數器、PWM通道等資源,為實現三相無刷直流電機的控制、換相檢測等提供了方便。
3 三相無刷電機的控制實現方法
圖1示出采用ATmega48單片機實現三相無刷電機控制器的原理圖。圖中,PC0、PCI和PC2為輸入,用以接收來自電機U,V,W換相的霍爾傳感器檢測信號;PD5和PD6用于控制電機U相的功率驅動器件;PBl和PB2用于控制電機V相的功率驅動器件;PD3和PB3用于控制電機W相的功率驅動器件;PC3為電機給定轉速的輸入電壓。

作為一種同步電機,直流無刷電機的轉子轉速受定子旋轉磁場速度及轉子極數的影響。當轉子的極數固定時,只要改變定子的旋轉磁場頻率,即可改變轉子的轉速。直流無刷電機是一種控制定子的旋轉磁場頻率,并將電機轉子轉速回饋控制中心進行反復校正.以達到接近直流電機的特性。當負載變化時,它能在額定負載范圍內控制電機的轉子維持一定的轉速。
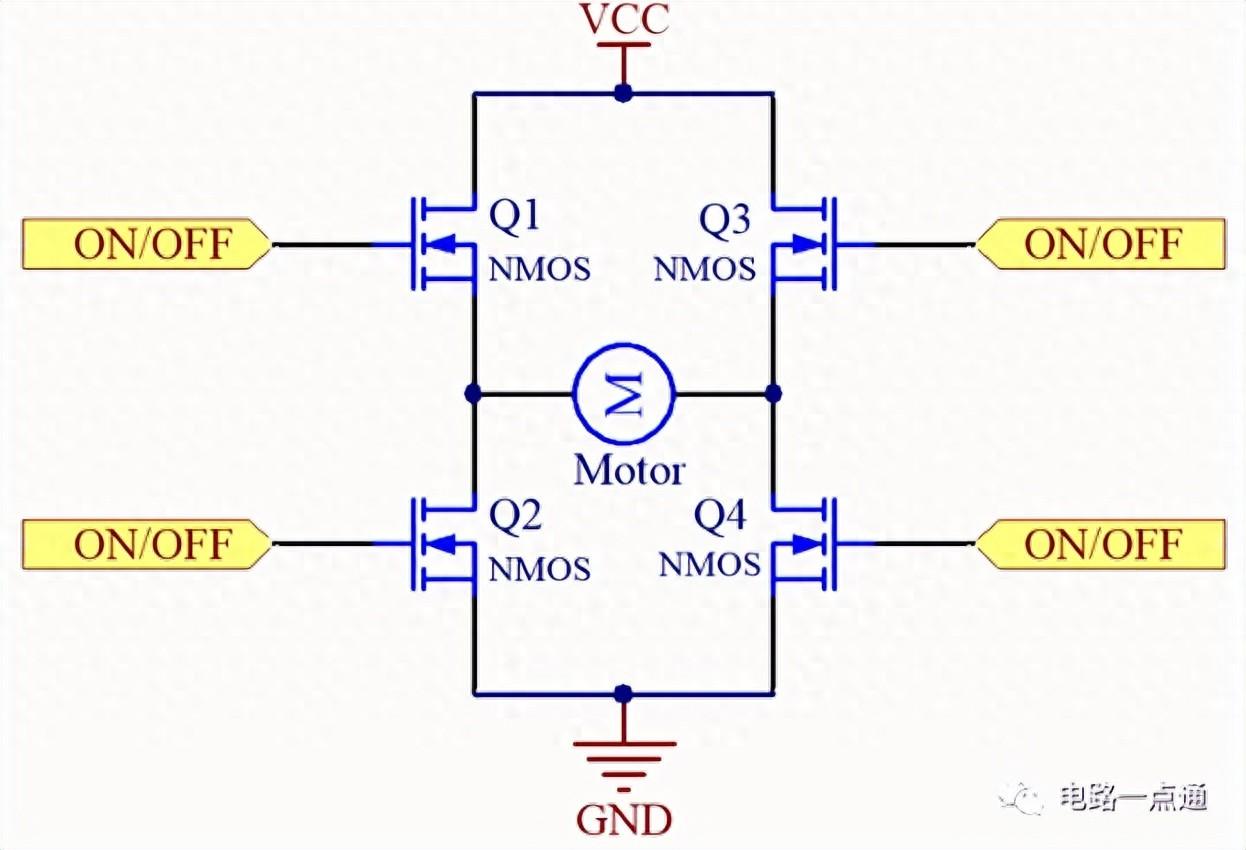
圖2給出用于圖1中的功率驅動電路。該驅動部分由上臂VQl,VQ3,VQ5和下臂VQ2,VQ4,VQ6的6個功率晶體管組成,用于連接電機作為控制流經電機繞組的開關。控制部分提供PWM,用于決定功率晶體管開關頻率及換相的時刻。在控制直流無刷電機轉速時.通常希望在負載變化時也能使電機轉速穩定在設定值內,而不發生太大的波動。因此,在無刷電機內部設置霍爾傳感器.以感應磁場變化,該傳感器既可作為電機轉速中閉環控制的速度反饋部件,也可作為相序控制的依據。


霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理









評論