基于MCS-51單片機的雷達模擬訓練卡設計

0 引言
本文引用地址:http://www.j9360.com/article/173836.htm動目標偵察雷達通常采用單脈沖全相參脈沖多普勒工作機制來有效提取復雜地雜波下的動目標信號,這種方法能有效跟蹤活動目標,提取目標的距離、方位、徑向速度等有用信息。該方法在民用領域主要用于邊防哨所的偵察警戒,軍事上則主要對戰場活動目標進行監視,因此,動目標偵察雷達正逐漸發揮出其重要作用。由于地面運動目標種類多樣,運動方式不同,產生的運動軌跡和多普勒音響差異很大,因此,為了能快速發現并跟蹤目標,降低對雷達操作手的要求,本文給出了一種通過雷達模擬訓練卡來為雷達操作手提供逼真訓練環境的具體方法。
1 總體設計思路
目前各科研院所研制的目標模擬器主要是對雷達信號的模擬,根據模擬信號頻率不同可分為射頻、中頻、視頻信號的模擬。此類模擬器主要用于對雷達性能指標的測試,其結構復雜但功能強大,造價也比較高。本文所研制的動目標模擬訓練卡主要用于訓練雷達操作手,而不用于檢測雷達性能指標,因此結構簡單。同時可將其制成雷達電路板的通用型號,并可直接通過接口電路置于雷達機箱內,操作攜帶都很方便。
動目標模擬訓練卡能模擬雷達的背景信號和動目標信號,可在不加高壓的情況下為雷達操作人員提供較為逼真的訓練環境。該模擬訓練卡能在 0 °~ 360 °的范位內模擬固定目標和動目標,其模擬運動目標的類型有單兵、輕型車輛、重型車輛、直升機、坦克等。
該動目標模擬訓練卡采用微型計算機的設計思路。其整體結構如圖 l 所示。
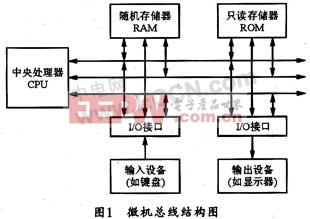
系統中的 MSC-51 系列芯片 80C 31 主要用于控制從 RAM 和 ROM 讀取背景、目標、多普勒音響等存儲信息;輸入設備采用雷達自身的薄膜操作鍵盤和距離/方位手輪;輸出設備采用雷達的 CRT 顯示器。這樣能使雷達操作人員快速熟悉鍵盤上各指令的操作位置及雷達裝備的結構特征,避免重復設計的浪費,達到模擬雷達操作人員訓練的最終目的。
2 雷達動目標模擬訓練卡電路組成
雷達模擬訓練卡的電路組成主要有 CPU 控制電路、背景產生電路、動目標產生電路和多普勒音響產生電路。圖 2 為該訓練板的電原理圖。

與其它雷達信號模擬器不同的是,該模擬雷達操作手的動目標信號首先存儲在動目標模擬訓練卡內,這些存儲的信號都是在雷達正常工作時錄入的,信號特征真實可靠,從而有效避免了其它雷達信號模擬器可能因自身模擬信號的產生故障而達不到訓練要求的困難。
動目標模擬訓練卡的工作過程是:首先由 CPU 根據當前薄膜鍵盤和控制手輪錄入的雷達方位碼和雷達狀態信號中的距離起點信息,調出預先存儲有各種動目標的聲音信號和背景信號。然后通過背景產生電路和動目標產生電路送出相應顯示段的背景信號和動目標信號,同時根據雷達狀態信號中的光標信號來判決當前的方位和距離上是否有動目標,若有則通過多普勒聲音產生電路送出相應的聲音信號。
3 具體電路設計及功能實現
CPU 控制電路是系統電路部分核心,其余的背景產生電路、動目標產生電路、多普勒聲音產生電路都由 CPU 根據雷達當前狀態決定其工作方式和內容。雷達狀態主要包括主時鐘信號、錄取光標信號、距離推移信號、背景采樣信號等,其中從距離推移信號可得到當前顯示的距離段,而從錄取光標信號加距離推移信號則可得到當前顯示的距離段上某一點的距離。微機數據總線可送來雷達狀態信息,如扇掃、顯示范圍等。
3.1 CPU 控制電路
CPU 的主要任務是按預定算法計算各動目標的運動方向和位置,更新動目標數據庫的數據,并根據方位和距離起點信息送出相應顯示段的動目標信號。本訓練卡的 CPU 采用 MCS-51 系列 80C 31 芯片,其 CPU 控制電路如圖 3 所示。
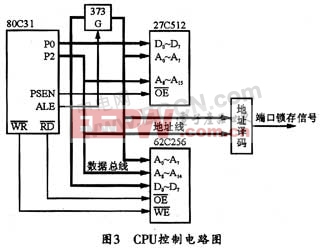
系統程序存儲器采用 27C 512 ,保證有 64KB 的程序空間給監控程序使用,數據存儲器則采用 62C 256 ,它有 32KB 的 RAM 可使用,地址譯碼電路可產生若干端口信號,這些端口信號可控制訓練卡的輸入輸出緩沖等接口,以保證從系統得到正確的輸入控制信號,并通過輸出端口控制輸出。在電路中, RAM( 62C 256) 占有 0000-7FFFH 的地址,剩余的地址分配給端口使用。









評論