基于微處理器與CAN的工業聯機控制系統

1 引言
CAN總線是目前流行的總線技術之一,是一種基于微控制器件的網絡。它用開放的,具有可互操作的網絡將現場各種控制器及儀表設備互連,構成現場總線控制系統,將控制功能徹底下放到現場,降低了安裝成本和維護費用。FCS實質是一種開放的、具可互操作性的、徹底分散的分布式控制系統。CAN總線屬于工業現場總線的范疇是目前流行的現場總線控制系統之一。與一般的通信總線相比,CAN總線的數據通信具有突出的可靠性、實時性和靈活性,同時具備了現場總線優點。本文提出一種基于CAN智能節點的設備聯機控制系統。
2 系統概述
本文設計的是一種基于工業設備控制系統的以CAN總線智能節點。節點分為控制節點、主機節點和從機節點三種,多個不同節點通過總線連接,形成多機聯控系統。系統雖然有三種不同功能的節點,每類節點采用相同的CAN節點結構。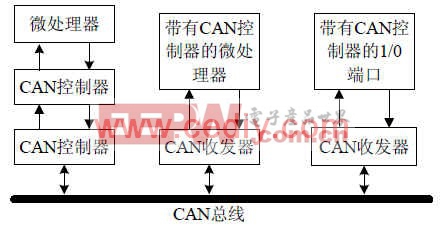
圖1 CAN總線節點結構示意圖
CAN總線節點可以歸納為三種構成方式: 1) CAN控制器的單片機+CAN收發器;2) 帶有CAN控制器的單片機+CAN收發器;3)帶有CAN控制器的I/O端口+CAN收發器。系統結構更為如圖1所示。本文選擇第一種方式連接方式,由于器件組合靈活,很容易實現高的性價比。
3 節點的硬件結構設計
3.1 節點控制芯片選擇
本研究選用的是美國微芯Microchip Technology公司的PIC芯片(PIC16F873,28腳FLASH)和福州貝能公司的MPLAB開發工具。MPLAB開發系統是一種廉價的開發工具,集編程器與調試器為一體。它利用了PICI6F87X的在線調試能力和MICROCHIP的串行編程技術(In-Circuit Serial Programming)。它工作于MPLAB-IDE集成開發環境軟件包下,直接連接到應用系統中去。PICI6F87X是MICIZOCHII)公司的中檔產品,繼承了MICROCI-III,的傳統特點,實用、低價、指令集少、低功耗。
PIC16F873開發裝置的不足之處有:系統只能設置一個斷點;運行系統程序后單步執行速度慢;由于占用了芯片資源,I/0管腳RB3,RB7,RB6功能不正常,無法調試.另外程序調試時,應注意編程電壓不能太低。
3.2 節點CAN通訊的硬件設計
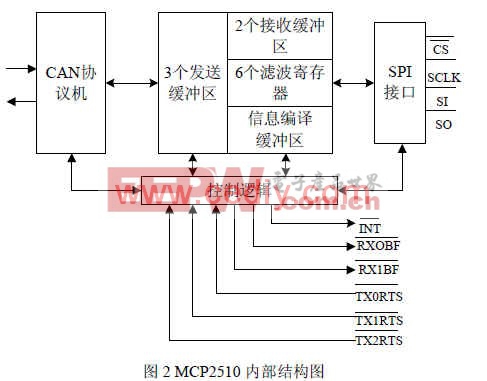
在CAN中應用的元器件主要包括CAN控制器和CAN收發器。本文選用的是獨立CAN控制器。PHILIPS公司的SJA1000管腳太多,占用過多的I/O口,MCP2510是目前市場上體積最小的CAIN控制器,通過SPI通訊方式與微處理器連接,連接端口少,所以系統選擇MCP2510作為CAN控制器。MCP2510只要跟MCU和驅動芯片(8X250 )就可以構成一個簡易局域網的節點。MCP2510可以完全實現CAN2.0A和CAN2.0B協議。圖2為MCP2510芯片的內部結構圖。












評論