基于AVR單片機的實驗加載閉環(huán)控制系統(tǒng)

摘要:針對科研實驗中對拉壓千斤頂加栽過程控制的需要,采用ATmega128單片機控制步進電機進而實現(xiàn)對執(zhí)行系統(tǒng)的電動泵站實行自動控制。對力和位移的數(shù)據(jù)采集與處理及用步進電機控制電動泵站手柄的技術(shù)細節(jié)作了重點描述。通過單片機的A/D變換器對AMP放大模塊采集的電橋信號作量化處理,千斤頂?shù)牟倏厥直恢靡离妱佑捅瞄y門開啟的方向和大小作若干定位,單片機根據(jù)力或位移傳感器信號,實時控制步進電機驅(qū)動手柄旋轉(zhuǎn)到相應(yīng)探控位置。
關(guān)鍵詞:電動油泵;千斤頂;傳感器;AVR單片機;A/D變換;串口通信;VB編程
分離式液壓千斤頂在生產(chǎn)建設(shè)、科學(xué)實驗等各類工程結(jié)構(gòu)加載工作中具有廣泛的用途。
該設(shè)備一般由電動高壓油泵+壓(拉)千斤頂組成,本文論及的加載系統(tǒng)規(guī)格如表1所示。
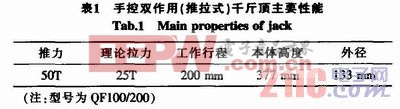
油泵電機直接帶動泵軸旋轉(zhuǎn),柱塞作往復(fù)運動,進油閥/排油閥工作,液壓油通過高壓油管進入千斤頂。用戶可通過泵站上的手柄,人工轉(zhuǎn)動泵內(nèi)卸荷閥處于不同位置,實現(xiàn)系統(tǒng)的加載/卸載、推力/拉力及加載速率和穩(wěn)壓作業(yè)。
在對力和位移數(shù)值或穩(wěn)壓時間等精度要求較高的科研實驗加載場合,顯然這種僅靠手工操作的方式難以勝任。給該設(shè)備增設(shè)電腦測控系統(tǒng)就成為一項與時俱進的技術(shù)革新,也是提高此類設(shè)備性價比的最佳方案。
1 下位機
由ATmega128構(gòu)成下位機控制核心(見圖1),其主要是對各通道放大模塊傳入的工作信號進行A/D變換,并根據(jù)上位機的指令驅(qū)動步進電機,達到控制執(zhí)行系統(tǒng)的工作目的。

1.1 數(shù)據(jù)采集
力和位移信號的測試由電阻應(yīng)變計組成的電橋傳感器完成,信號放大器采用AMP1型放大模塊。此兩者間的適當(dāng)匹配對單片機能否順利執(zhí)行數(shù)據(jù)采集工作至關(guān)重要。技術(shù)關(guān)鍵是對電橋平衡的調(diào)控。信號進入單片機后,若有少量的偏移電壓可通過軟件作些補償,若偏移量過大會造成此通道無法工作。因此有必要在放大模塊的前端,用電位器把偏移較大的模擬信號調(diào)整過來。調(diào)零電路如圖2所示。












評論