基于單片機的智能救援機器人小車設計

5 越障部分
越障無疑是這款智能救援機器人的突出特色。傳統的救援機器人把重點都放在了如何救援,而忽略了路途的險惡,致使救援機器人有去無回。我們充分認識到這一點,在越障部分做了相當大的改進。三個車輪通過齒輪嚙合組成一個大的車輪,當超聲波模塊檢測障礙物時,整個大的車輪翻轉,使其順利越過障礙物,到達目的地,如圖4所示。本文引用地址:http://www.j9360.com/article/172500.htm

6 現場采集部分
救援現場環境復雜,存在許多潛在危險,救援人員恐難進入,但救援人員又必須準確掌握現場的環境,為救援工作創造有利的條件。通過高清攝像頭很好地解決了上述問題。為了實現多方位拍攝現場畫面,使用舵機來控制它的旋轉角度,減速電機控制它的升降。然后,畫面通過無線視頻傳輸模塊發送到上位機界面上,以供救援人員參考。
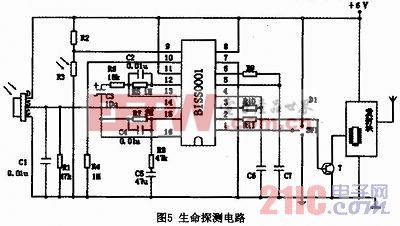
7 生命探測模塊
生命探測模塊也是救援機器人不可或缺的部分,因為要想救援傷員,首先需要探測傷員的位置,這就需要生命探測模塊了。
BISS0001是一款高性能的傳感信號處理集成電路。靜態電流極小,配以熱釋電紅外傳感器和少量外圍元器件即可構成被動式的熱釋電紅外傳感器。原理圖如圖5所示。












評論