一種簡易智能機器人的設計及應用

3、系統的軟件設計
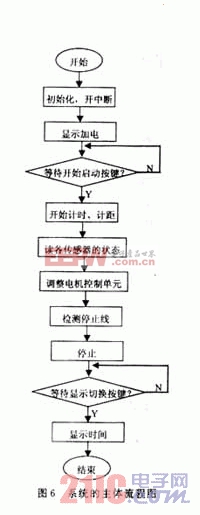
該系統配套的軟件程序采用模塊結構,由C語言編寫完成。主要由初始化程序、偏道調整程序、偏離光源調整程序、聲光指示子程序、讀傳感器狀態、顯示程序、定時器0的中斷服務程序、定時器1的中斷服務程序、外部中斷0的服務程序、停車處理等模塊組成。系統的主體流程如圖6所示。
4、結語
該機器人在認為設定的跑道上經過多次實驗,達到了預期的效果,但是其智能化程度還遠遠不夠。隨著人工智能和神經網絡技術的不斷研究和深入,智能機器人的發展前景將會越來越廣闊。
參考文獻
[1]段九州.振蕩電路使用設計手冊[M].沈陽:遼寧科學技術出版社,2002.
[2]段九州.電源電路使用設計手冊[M].沈陽:遼寧科學技術出版社,2002.
[3]方大千,鮑俏偉.實用電子控制電路[M].北京:國防工業出版社,2002.
[4]張培仁.基于C語言編程-MCS-51單片機原理與應用[M].北京:清華大學出版社,2002.
[5]徐愛鈞,彭秀華.單片機高級語言C51 Windows環境變成與應用[M].北京:電子工業出版社,2001.












評論