基于STM32F103RCT6的電腦鼠控制系統方案解析

1 電腦鼠工作原理
本文引用地址:http://www.j9360.com/article/171496.htm電腦鼠周圍安裝六組紅外傳感器,分別感知左方、左前方、前方、右前方、右方,發射端發射一定頻率的紅外線,接收端通過六個方向的反射波來判斷是否有障礙物,實時地儲存單元格的資料,通過六組紅外傳感器反饋的迷宮信息,控制電腦鼠完成避障、轉彎、加速等動作,運用智能算法對迷宮的部分單元格或全部單元格進行遍歷,并將迷宮的信息以有效的數據結構存儲,微控制器根據這些記錄信息運用迷宮高效算法找到一條最優化路徑,從而實現從起點到終點的最大化沖刺。
2 硬件電路設計
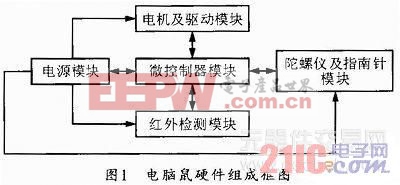
為完成迷宮探測和沖刺任務,電腦鼠需具備以下各功能模塊:ARM微處理器作為控制核心協調各功能模塊正常工作;電機及驅動模塊實時控制電機啟動、制動;紅外檢測模塊負責紅外線探測感知;電源為整個系統供電穩定電壓,陀螺儀及指南針模塊確定電腦鼠方位,根據走過的距離,從而解析出所在坐標。硬件組成如圖1所示。
2.1 電源模塊
電源調節器件通常使用線性穩壓器件(如LM7805),具有輸出電壓可調、穩壓精度高的優點,但是其線性調整工作方式在工作有較大的“熱損耗”,導致電源利用率不高、滿足不了便攜低功耗需求。開關電源調節器,不同于線性穩壓器件,以完全導通或關斷的方式工作,通過控制開關管的導通與截止時間,有效的減少工作中的“熱損耗”,提高了電源利用率。本設計中電源模塊為系統提供三種不同的電壓,12V電源用于驅動電機,使用開關式電源LM2596將12V直流電壓降到5V給紅外模塊、人機交互模塊供電,再通過AMS1117將5V降到3.3V,供ARM處理器及其他模塊使用。
2.2 微處理器模塊
微處理器是整個控制系統的核心,它完成從紅外檢測模塊獲取路徑信息,采集瞬時速度,進行數據處理,控制算法運算,輸出實時控制量等功能。為了保證系統的實用性和易擴展性,本控制系統采用意法半導體推出的“增強型”系列STFM32F103RCT6,STM32F103xx增強型系列使用高性能的ARM Correx-M3 32位的RISC內核,工作頻率為72MHz,內置高速存儲器(高達128K字節的閃存和20K字節的SRAM),豐富的增強I/O端口和聯接到兩條APB總線的外設。所有型號的器件都包含2個12位的ADC、3個通用16位定時器和一個PWM定時器,還包含標準和先進的通信接口:多達2個I2C和SPI、3個USART、一個USB和一個CAN,在存儲容量和運算速度方面滿足要求。
2.3 電機及驅動模塊
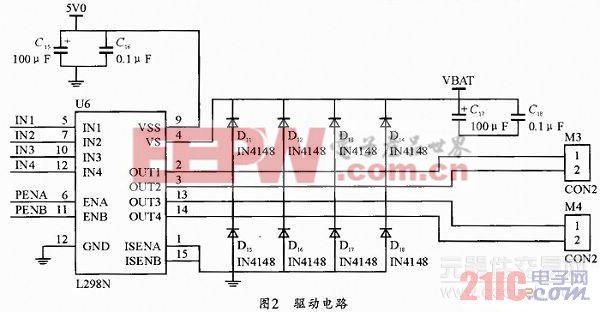
為提高系統功率、降低功耗,驅動電路采用基于脈寬調制方式的集成電路芯片L298N。比較常見的是15腳Muliwart封裝的L298N,內部包含四通道邏輯驅動電路,即內含兩個H橋的高電壓大電流雙全橋式驅動器,可以驅動和控制兩個直流電機,芯片采用供給電機電源和邏輯電平電源的雙電源供電,可接受標準TTL邏輯電平信號,驅動46V,2A以下的電機,并可驅動電感性負載。其中ENA、ENB是控制使能端,IN1、IN 2、IN3、IN4是控制電平輸入端,電路如圖2所示。本設計中采用空心杯直流電機,它具有突出的節能特性、靈敏方便的控制特性和穩定的運行特性,最大效率一般在70%以上,部分產品可達到90%以上;起動、制動迅速,響應極快;其重量、體積相對減少1/3-1/2,通過PWM調節脈沖占空比進行調速。
2.4 紅外檢測模塊
紅外檢測模塊主要負責迷宮環境監測和處理。紅外線經調制后由發射管發出,接收管接收迷宮墻壁反射光,根據接收反射信號強弱來判斷與隔墻的距離。本系統相對傳統紅外檢測方法做如下特點:
(1)紅外傳感器由原來的5組增加到6組。除了正前、正左、正右以及正前方兩個45度斜角外,正前方增加1組紅外傳感器,通過正前方兩組傳感器信息的融合實現路口45度斜走,相對于以往的90度直角調整,節約了時間,提高了效率。
(2)采用基于雙T選頻網絡的放大器設計,紅外傳感器根據反射信號的強弱實現電腦鼠與障礙物之間的測距。以往使用的是一體化紅外接收傳感器(如IRM8601S),其接收頭內部集成自動增益控制電路、帶通濾波電路、解碼電路及輸出驅動電路,但由于檢測信號輸出的是數字信號,只能判斷有或無障礙物,不能根據檢測信號輸出的強度計算距離。本設計中采用基于雙T選頻網絡和TLC084組成的選頻放大設計,實現頻率不同增益不同,對有用信號進行放大處理,濾除或抑制無用信號。
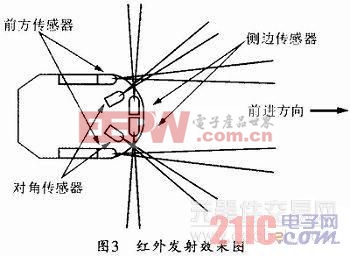
(3)發射三種頻率調制波,減少信號之間的干擾。6組傳感器分為三組,正左和正右兩組傳感器負責檢測電腦鼠是否走在中線上,以便及時做出姿勢校正;左前方和右前方兩組傳感器主要檢查前方是否有路口;前方兩組傳感器配合電機,協同工作實現45度轉彎。紅外光發射頻率越高,傳播距離相對越遠,在本設計中由于迷宮墻壁之間距離16.8cm(單元格18cm.墻壁厚度1.2cm),而電腦鼠的寬度一般為10cm左右,車體距兩邊墻體的距離只有3cm左右,所以正左方和正右方發射頻率選擇為33kHz,左前方和右前方發射35kHz,正前方距離最遠,發射頻率為38kHz。具體如圖3所示。












評論