基于MSP430的自控式骨矯形器的設計與實現

自1904年Codivilla報告骨延長術開始,肢體延長術已經發展了100多年,骨緩慢牽張再生理論已經形成且不斷完善,與此同時肢體延長器械也在不斷發展。目前肢體延長的手術技術和器械經歷了三個發展階段[1]: (1)骨外固定支架技術;(2)髓內釘結合外固定支架;(3)完全植入式肢體延長器。骨外固定支架技術采用人工外力控制實現骨矯形器的拉伸,拉伸的控制精度低,操作難度大,臨床應用中容易引發針道感染,不利于延長區骨質愈合,同時長時間攜帶外固定器也會在患者的生理和心理上造成不良影響。髓內釘結合外固定支架技術在穩定性、延長精度上有了長足的發展,但仍無法避免外固定支架帶來的不良后果。完全植入式骨延長器,因其內置動力發生裝置可精確控制延長速率同時又可避免針道感染問題等優勢,成為骨延長器的發展方向。目前此技術最成熟和最具代表性的是ORTHOFIX公司研制開發的髓腔內置式骨骼動力延長器(ISKD), 它由外置的監測器和手術植入的類似伸縮望遠鏡桶式的髓內釘組成,其基本原理是靠患者的關節活動旋轉帶動內部牽張器牽張。但其缺點是只能牽張,不能回縮加壓固定,一旦活動度大,超過單次牽張長度,不能回縮,有可能導致斷骨面不能生長,存在極大的臨床應用風險。
目前,我國肢體延長的手術技術及器械還停留在第二階段[2],遠遠落后于發達國家。我國的國家中長期科技發展綱要中,已經把新型醫療器械的研發作為鼓勵投資和自主創新的新領域。為此,本文設計了一種以MSP430F169單片機為核心的高精度、自控式骨矯形器。該骨矯形器不但克服了外固定器的缺點,也克服了ISKD不能回縮加壓固定的缺點。采用電機控制,操作簡單方便,用戶可以根據需要自控骨矯形器的伸縮,延長精度高,具有廣闊的應用前景。
1 系統總體設計
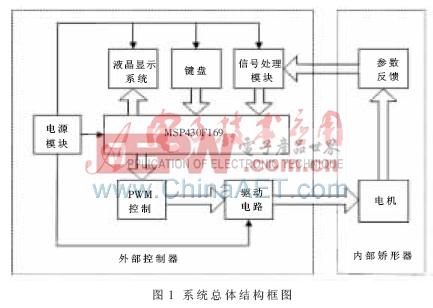
系統由植入長骨骨髓腔的內部骨矯形器和體外的控制器兩部分組成。體外的控制器通過生物硅膠管引線與內部骨矯形器相連,主要由MSP430F169單片機、電機驅動電路、電源模塊、信號處理模塊、鍵盤及液晶顯示系統等相關單元組成。體內骨矯形器通過精密電機的運行實現自身伸縮,單片機通過由磁敏傳感器構成的參數反饋模塊及信號處理模塊實現對骨矯形器的精確控制。系統總體結構框圖如圖1所示。
為滿足用戶對便攜性的要求,矯形器系統采用電池供電。因此低功耗是系統的一個主要指標,為此系統選用具有超低功耗特點的MSP430系列單片機。在MSP430F169單片機的基礎上搭建系統平臺,同時配合軟件中斷處理機制,非常好地實現了系統的低功耗指標。高精度控制是系統的另一個主要指標,骨矯形器必須保持高精度牽張、回縮控制,任何誤差都會給用戶帶來不良影響。系統使用ZP系列傳感器傳回微電機運行信號,信號經過放大處理后送回單片機處理,實現精確控制。根據軟件設計,系統實現運行精度為0.1 mm,其精度遠高于現有矯形器。
2 系統硬件設計
2.1 MSP430F169單片機
MSP430F169[3]單片機是美國德州儀器公司生產的具有超低功耗、功能強大的16位單片機。它采用“馮·諾依曼”結構, RAM、ROM及全部外圍模塊都位于同一個地址空間內, 最大尋址地址為62 KB;具有強大的中斷功能, 48個I/O 引腳, 每個I/O口分別對應輸入、輸出、功能選擇、中斷等多個寄存器, 在對同一個I/O口進行操作前,選擇其要實現的功能便可實現功能口和通用I/O口的復用, 大大地增強了端口的功能和靈活性;MSP430F系列超單片機自帶閃速存儲器,運行在1 MHz時鐘條件下時,工作電流視工作模式不同僅為0.1~280 μA;同時它具有良好的仿真開發技術,設置有JTAG仿真接口和高級語言編譯器。















評論