基于PLC的三自由度機械手控制系統設計與實現

摘要:為了提高機械手在工業生產中定位的精度,介紹一種基于PLC的三自由度機械手控制系統設計方案。方案中提出了步進電機在機械手定位應用中的一種新思路,詳細論述三自由度機械手控制系統的硬件結構及軟件實現方法,并建立M(GS組態環境界面對系統的運行進行監控。測試結果表明,該系統運行穩定,定位精確,具有較高的應用價值。
關鍵詞:PLC;三自由度;機械手;步進電機;MCGS組態環境
0 引 言
機械手是一種能模擬人的手臂動作,按照設定程序、軌跡和要求,代替人手進行抓取、搬運工件或操持工具的機電一體化自動裝置。三自由度機械手又稱3D機械人,能夠實現三個自由度方向(水平、垂直和旋轉)的抓取或放置物品,具有操作范圍大,靈活性好,應用廣泛的特點。
可編程控制器(PLC)是一種專門為工業應用而設計的進行數字運算操作的電子控制裝置。由于其具有可靠性高,功能強,編程簡單,人機交互界面友好等特性而廣泛用于工業控制系統。
步進電機是將電脈沖信號轉變為角位移或線位移的開環執行元件。在非超載情況下,電機的轉速、停止位置只取決于脈沖信號的頻率和脈沖數目。這一線性關系的存在,加上步進電機只有周期性誤差而無累計誤差的特點,使其在速度、定位等控制領域應用得非常廣泛。
機械手按驅動方式可分為液壓式、氣動式、電動式和機械式機械手。本文設計的三自由度機械手屬于混合式機械手,它綜合了電動式和氣動式機械手的優點,既節省了行程開關和PLC的I/O端口,又達到了簡便操作和精確定位的目的。
1 三自由度機械手的系統結構與運動方式
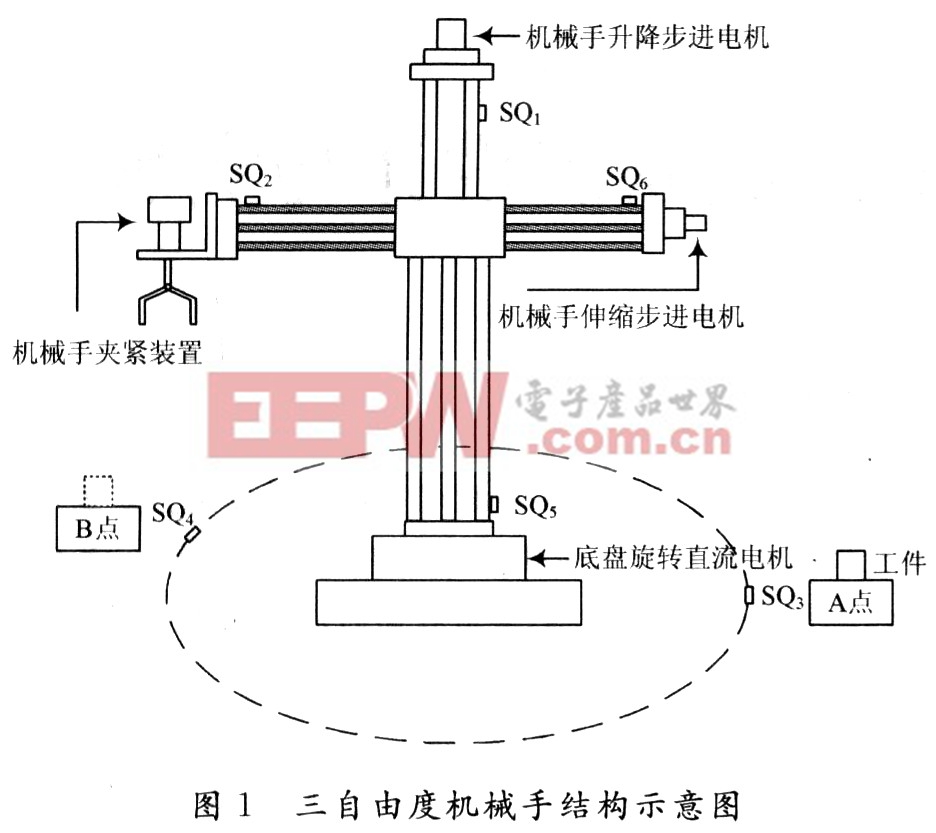
三自由度機械手為圓柱坐標型。圖1為機械手結構示意圖,機械手手臂的左右運動(水平方向)由伸縮步進電機控制,上下運動(垂直方向)由升降步進電機控制,逆時針和順時針旋轉運動則由底盤直流電機的正反轉控制。機械手的夾緊裝置采用關節結構,其夾緊與松開用氣壓驅動,并由電磁閥控制。
機械手可以根據設定程序的動作將工件從A處搬運到B處。SQ1,SQ2,SQ5,SQ6為水平和垂直方向上的限位開關,SQ3,SQ4為原點位置和終點位置的光接近開關。
2 三自由度機械手控制系統設計
三自由度機械手系統設置了手動工作方式和自動工作方式。自動方式又分為自動回原點、單步、單周期、連續四種工作方式。
2.1 硬件設計
主控制系統選用三菱FX2N系列晶體管輸出型PLC,步進電機驅動器選用SH-20403型模塊。機械手的外部接線圖如圖2所示。


pid控制器相關文章:pid控制器原理
電容式接近開關相關文章:電容式接近開關原理








評論