基于pro/e的中小型排水管道清淤機器人虛擬樣機設計

隨著國民經濟的迅速發展,環境污染日益嚴重,環保問題越來越受到社會各界的普遍關注。城市污水排放是確保環境衛生、建設現代化文明城市的重要一環。目前,我國絕大多數城市排水管道的清淤工作仍普遍處于人工作業的落后狀況,不僅體力繁重、效率低,而且井下工作環境惡劣,易于引發爆炸等事故傷害。文獻檢索的結果表明,國內外管道機器人多用于核反應堆管道和油氣輸送管道的檢測、補口等工作,而排水管道清淤機器人的研究尚屬空白。鑒于這種情況,我們進行了排水管道清淤機器人的研究,并在Pro/Engineer平臺上進行了清淤機器人虛擬樣機設計。
本文引用地址:http://www.j9360.com/article/163330.htm一、排水管道清淤機器人設計方案
排水管道清淤機器人本體采用四輪結構,輪子用耐磨、耐腐蝕的合成橡膠制成,并在其表面加設花紋以增大摩擦力。車輪與管道壁接觸處的形狀與管壁的弧形完全一致,以盡量做到無間隙接觸。車體前部裝有作業刀具,用于清理管道中的樹枝及鈣化物等淤積物。清理后的淤積物在水流的沖刷下被帶到下游管道檢查井。
虛擬樣機(Virtual Prototyping) 是當前設計制造領域的一門新興技術,該技術是在計算機上通過CAD/ CAM/ CAE等技術將產品信息集成到計算機提供的可視化虛擬環境,在實際產品制造之前實現產品的仿真、分析與優化過程。
2.1 管道清淤機器人虛擬樣機的系統結構
管道清淤機器人虛擬樣機將管道清淤機器人研究與虛擬樣機技術相結合, 針對機器人設計與制造過中的運動學與動力學分析、軌跡和路徑規劃、機器人與工作環境的相互作用等技術內容進行研究與系統開發,通過系統仿真軟件在相應虛擬環境中真實地模擬系統的運動,在計算機上方便地修改設計缺陷,仿真不同的設計方案,對系統進行不斷的改進,直至獲得最優的設計方案以后,再做出物理樣機。
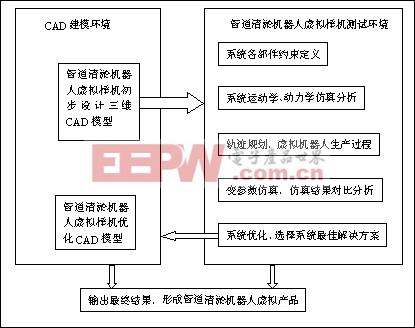
圖1 管道清淤機器人虛擬樣機系統結構圖
2.2 利用Pro/e實現管道清淤機器人虛擬樣機設計
Pro/Engineer的主要功能是進行參數化的零件造型設計,所提供的功能包括實體造型設計、曲面設計、建立工程圖、零件組合、簡單的有限元素分析、模具設計、電路設計、裝配零件設計、加工制造、逆向工程等。
本文以錐齒輪為例詳細介紹pro/e的參數化設計過程。設計步驟如下。
1. 新建零件文件
(1)新建零件文件:“bevelgear”。
(2)取消選中【使用缺省模板】復選項,選用【mmns-part-solid】。









評論