微機聯控在多電機隨動控制系統中的應用

摘要:隨動控制是伺服控制的一種,屬于一種反饋控制。它的給定值在很大范圍內變化,可使系統的隨動變量快速、準確地跟隨給定值任意變化。主要解決一定精度的跟隨問題。本文介紹使用多臺自整角機分別實現對多臺驅動電機轉子位置信號的檢測,應用單片機對采集到的信號進行處理和傳送,提出基于單片機和變頻器對異步電機轉速實施閉環控制的隨動伺服控制系統,實現高性能的電機異地隨動控制。
關鍵詞:伺服控制;自整角機;單片機;變頻器;伺服電機
1 問題的提出與現狀分析
現有的電機控制系統主要分為兩大類,一是傳統的繼電器-交流接觸器控制系統,目前仍廣泛應用于電機運行的簡單控制中,例如完成電機的點長動、正反轉、星三角變換等常規運行控制。二是微機控制技術與交流接觸器、變頻器控制系統結合,主要的控制形式是可編程序控制器(PLC)在電機控制電路中的應用,控制電路中除了保留主電路中的交流接觸器外,其邏輯控制部分如:自鎖互鎖、延時定時、順序控制、機械手臂動作控制等都由PLC編程實現,極大地簡化了控制回路的外連電路,提高了控制精度、穩定性和可靠性。如果用PLC和變頻器相結合共同控制電機,可以很方便地實現交流電機的變速、調速運行。這兩大類控制技術目前都已經相當成熟,而且得到了廣泛應用。
盡管如此,還是有許多電機應用場合的控制功能得不到滿足,例如:雙電機或多電機的異地驅動中,要求轉速嚴格同步的驅動控制;集群式太陽能采集板多電機的轉角同步控制等等。對電機的這種并行同步控制需求,顯然不能簡單應用上述兩種控制方式來實現,因為隨著被控單元數量的增加和物理空間分布的分散,需要使用的PLC數量也會增加,控制系統的成本將激增,極大地降低了控制系統的性價比。本文從雙電機的同步驅動出發,探討多電機的同步驅動問題,應用角度傳感器(自整角機)和單片機組成多微機聯控的”集散式”隨動控制系統,通過單片機-變頻器-伺服電機的閉環調速驅動方式,實現雙電機或多電機的轉速”隨動同步”控制。
2 異地隨動轉速同步控制原理
2.1 電機實際轉速偏差形成的原因與危害
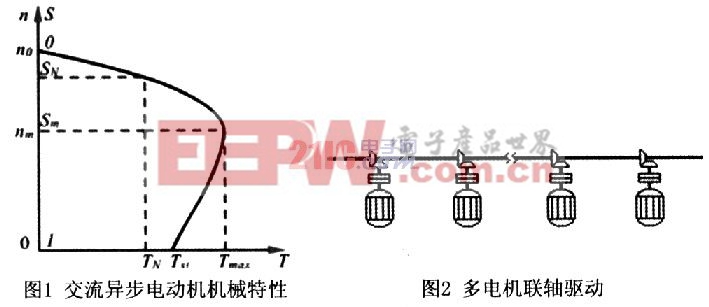
交流電機控制電路中,通常采用開環的位式控制或采用變頻器的變速控制。盡管各電機參數相同,給定的電壓或頻率也相同,但由于負載轉矩不同,還是會產生實際轉速的偏差,若電機的機械特性較硬,則這個偏差不大,在不要求轉速嚴格同步的應用場合此問題可以忽略;但要求嚴格同步時則可能產生嚴重問題。例如大跨距的大型龍門吊,其雙軌行程的并行電機驅動控制中,較小的轉速偏差隨時間積累將形成很大的行程偏差,加大了輪轂與鋼軌的側向摩擦力,甚至別死車輪;又如多電機聯軸驅動不接差速器時,偏差積累的強大力矩會使鋼軸變形等。
2.2 雙電機簡單隨動控制結構及原理
雙電機驅動控制系統中,為了避免由于負載轉矩的不同,導致電機轉速產生偏差,應設雙電機中任一電機為主動電機,另一電機為隨動電機。主控電機直接接受操作控制或變頻器驅動,設有主控單片機控制器,角度/速度傳感器,將主動電機的轉子位置、轉速、轉向數據采集處理后向隨動電機控制器串行發送;隨動控制器接收主控制器發來的主動電機數據作為給定值,且與角度轉速傳感器、變頻驅動器和伺服驅動電機組成有轉速反饋的閉環控制系統。應用最少拍控制算法以提高響應的實時性并消除靜差,或應用PID控制算法減小過調量并消除靜差,使隨動電機與主動電機的轉速真正實現并行同步。











評論