基于DSP的雙足機器人運動控制系統設計

1 系統概述
雙足機器人每條腿設有5個自由度,這樣既可以實現基本的步行功能,又盡可能的簡化了控制變量,系統整體結構如圖1所示,L1~L5分別對應左腿髖側向、髖前向、膝前向、踝前向、踝側向關節電機,R1~R5對應右腿。考慮到成本因素和驅動性能,選用Maxon的EC-max系列三相無刷直流電機來驅動關節活動,其中1號和5號電機選用EC-max35型,其他均為EC-max30型。受安裝空間所限,每條腿的運動控制器都為獨立的個體,各運動控制器通過主控計算機進行協調控制并可基于運動指令單獨完成動作,類似于人類反射弧的原理,減輕主控計算機的工作量,加快反應速度,主控計算機和運動控制器之間通過CAN總線來傳遞數據。
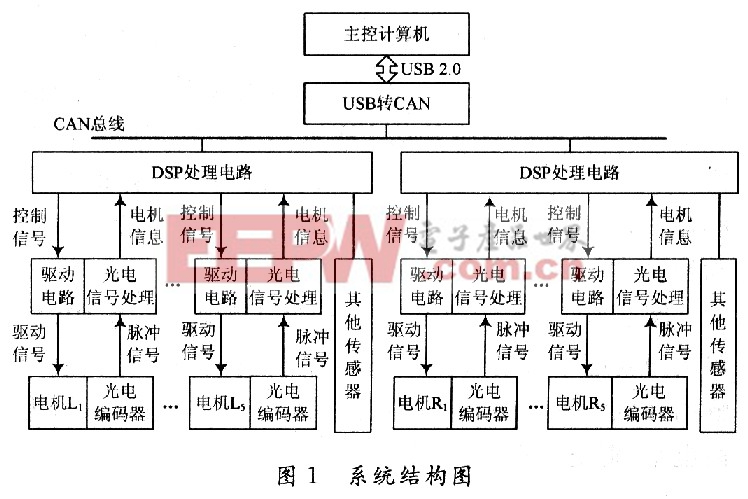
機器人雙足步行時,主控計算機根據運動周期向底層運動控制器發送運行和停止等指令,完成對行走狀態的監控和數據運算。單個運動控制器由DSP處理和電機控制兩部分組成:DSP處理電路負責與主控計算機和傳感器之間交換各類信息、分析接收到的數據并運算輸出相應關節電機的控制信號;電機控制電路根據控制信號驅動相應的電機動作,達到要求的速度和角度,并對光電編碼器信號進行處理,將執行結果反饋給DSP形成閉環控制,保證執行的精度。
數據處理器選用的是TMS320F2812,它擁有基于C/C++高效32位DSP內核,提高了運算的精度;時鐘頻率高達150 MHz,增強了系統的處理能力;集成了128 KB的FLASH存儲器、4 KB的引導ROM、數學運算表以及2 KB的OTP ROM,改善了芯片應用的靈活性;兩個事件管理器模塊為電機及功率變換控制提供了良好的控制功能;16通道高性能12位ADC單元提供了兩個采樣保持電路,可以實現雙通道信號同步采樣,適合整個運動控制器的開發需求,其代碼和指令與F24x系列完全兼容,更是保證了項目開發和產品設計的可延續性。











評論