步進電機位移的模糊PID控制設計方案

摘要 步進電機是數字離散電機,特別適用于數字離散控制。但是其數學模型具有高度非線性的特點,PID控制難以實現較高精度性能,本文把模糊控制和PID控制結合起來,根據設置好的誤差范圍,實現自動切換。
關鍵詞:步進電機 模糊控制 PID 參數自整定 數學模型 仿真
Stepper Motor Fuzzy PID Control
Sun Pan Jun Yan Xue Wen
( School of Electronic Information Engineering Tai Yuan University of Science And Technology )
Abstract Stepper motor is a digital discrete motor, that is especial suitable for digital discrete control. But its mathematical model is highly nonlinear, PID control is difficult to achieve high precision performance, the paper combines the fuzzy control with PID control。According to set good error range, the system can achieve automatic switching.
Key words stepper motor PID Fuzzy control Parameter Self-tuning Mathematical Model Simulation
1前言
步進電機本質上是數字離散電機,直接接受數字量,將電脈沖信號轉變成位移信號,即給一個脈沖信號,步進電機就轉動一個角度。步進電機內部各控制變量高度非線性且相互耦合,而傳統PID控制是以精確數學模型為基礎的,無法有效應對系統的不確定信息,用不變的PID參數不可能達到較好的控制結果。模糊控制不需要對象的精確數學模型,對系統變化不敏感,魯棒性好,抗干擾性強。但是由于它的模糊性,穩態精度不好。對于這種情況,可以把模糊控制和PID控制結合起來。
2混合式步進電機數學模型
本文采用兩相步進電機,在忽略互感、漏磁、磁滯、渦流、飽和等影響的情況下,我們采用可以對于一相用一等值有效RL電路繞組進行分析。
選用4拍步進方式,設以A相為基準,則B相滯后A相90電角度,則有以下電流方程:![]()
根據力學定律可以寫出電動機的機械運動方程:![]()
其中 電機轉矩, 為負載轉矩, 為轉動慣量, 為粘滯摩擦系數, 為轉子角速度,假設負載轉矩為零,則有以下微分方程:![]()
則式(1 )、(2)式、(3)、(4)組成了兩相步進電機的數學模型,從中可以看到步進電機是一個高度非線性被控對象,這就要求控制方法非常復雜,而模糊控制正好適用這一特性。
3步進電機模糊PID設計
在工業控制中,PID控制是應用最廣泛的模擬控制方法,用計算機對其采樣進行離散化,可以實現數字PID公式

本文采用二維模糊控制系統,模糊推理輸入模糊語言變量為偏差E和偏差變化率EC模糊域為[-3 3],輸出為PID的三個變化增量 、 、 ,將輸入模糊語言變量E .EC和輸出模糊語言變量 的語言值選為都選為7個,即{負大(NB),負中(NM),負小(NS),零(Z),正小(PS),正中(PM),正大(PB)}。
設控量偏差和偏差變化率以及 、 、 的基本論域[-0.5 0.5]則可以確定量化因子和模糊因子
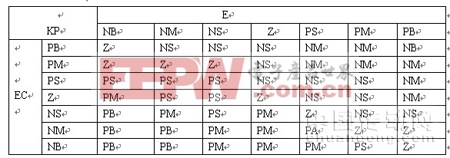
表1 KP模糊規則
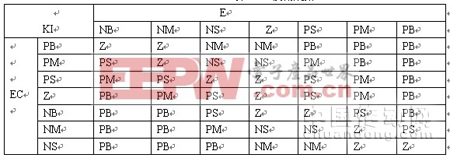
表2 KI模糊規則

表3 KD模糊規則











評論