基于CCD攝像頭智能車分段PID控制算法設計

自動尋跡智能車涉及到當前高技術領域內的許多先進技術,其中最主要的是傳感技術、路徑規劃和運動控制。本課題是以飛思卡爾智能車競賽為背景,以單片機作為核心控制單元,以攝像頭作為路徑識別傳感器,以直流電機作為小車的驅動裝置,以舵機控制小車轉向。車模競賽的賽道是一個具有特定幾何尺寸約束、摩擦系數及光學特性的KT板,其中心貼有對可見光及不可見光均有較強吸收特性的黑色條帶作為引導線,寬度為2.5 cm。在行駛過程中,系統通過攝像頭獲取前方賽道的圖像數據,同時通過測速傳感器實時獲取智能車的速度,采用路徑搜索算法進行尋線判斷和速度分析,然后作控制決策,控制轉向舵機和直流驅動電機工作。智能車通過實時對自身運動速度及方向等進行調整來“沿”賽道快速行駛。本文主要介紹攝像頭通過提取賽道黑線信息交予單片機處理,通過單片機輸出控制信號控制舵機轉向來控制車模的轉向,從而很好的自動循跡。
1 總體軟硬件結構及思路
此智能車輛定位系統用攝像頭拍攝車輛前方的賽道,通過MC9S12XS128采樣視頻信號,獲得圖像數據。然后用合適的算法,如跟蹤邊緣檢測算法,分析圖像數據,提取目標指引線。然后,系統根據目標指引線的位置信息,對舵機和電機施以合適的控制。本智能車運動系統的結構圖如圖1所示。
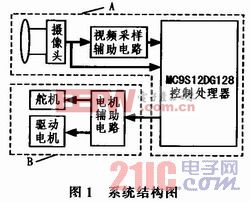
因為系統是一個有機的整體,所以需配合好系統的攝像頭、控制單片機、電機(包括直流伺服電動機、光電編碼器)、舵機和輔助電路(電源板、電機驅動板)等各個部分。舵機是實時控制車模的轉向,是比賽快速性和穩定性的關鍵,舵機控制有很多的控制算法,如:PID經典控制算法、模糊算法、人工智能算法等。
2 系統程序總體控制流程
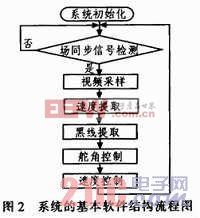
系統的基本軟件流程是:首先,對各功能模塊和控制參數進行初始化;然后,通過圖像采集模塊獲取前方賽道的圖像數據,同時通過速度傳感器模塊獲取賽車的速度。采用PID對舵機進行反饋控制。另外根據檢測到的速度,結合速度控制策略,對賽車速度不斷進行適當調整,使賽車在符合比賽規則的前提下,沿賽道快速行駛。系統的基本軟件結構流程圖,如圖2所示。
系統的軟件要求控制的準確性、穩定性。采樣提取黑線是控制輸入量的基礎,要求采樣的精確穩定。輸入量給舵機以后又要求舵機輸出的快速相應性、穩定性和準確性。經過多次實驗及近一個學期的調車經驗,選用了并改進了經典的PID控制器對車模的舵機進行控制調節。

pid控制器相關文章:pid控制器原理











評論