一種基于模糊-PI雙模控制器設計方法

3 模糊-PI雙模控制系統的仿真本文引用地址:http://www.j9360.com/article/162295.htm
3.1 建立模糊推理系統結構
在MATLAB命令窗口鍵入fuzzy研命令進入模糊邏輯工具箱,在FISEditor窗口的Edit菜單下確定輸入、輸出變量的論域范圍和各個語言變量的隸屬函數形狀等參數,雙擊每個圖標就可以進行編輯,得到模糊控制器的文件。
3.2 建立模糊控制規則
用Edit菜單下的rules打開模糊規則編輯器確定“IF…THEN”形式的模糊控制規則。u共有控制規則30條,每條規則的加權值都缺省為1,推理算法為max-min合成法,解模糊方法采用取中位數法。將設計好的模糊控制器保存在一個用戶自己定義的文件,后綴為fis。
3.3 創建仿真框圖
在Simulink環境下,建立模糊-PI雙模控制器仿真系統結構,如圖6所示,仿真結果如圖7所示。
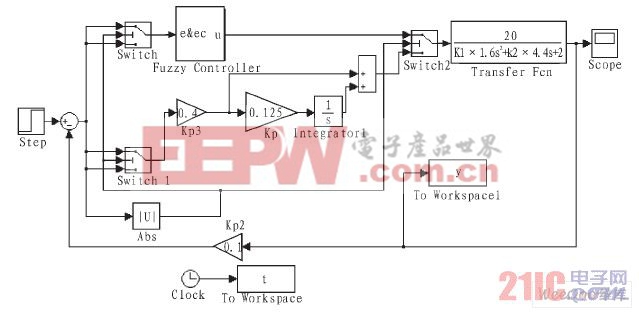
圖6 雙模控制器在Simulink環境模型
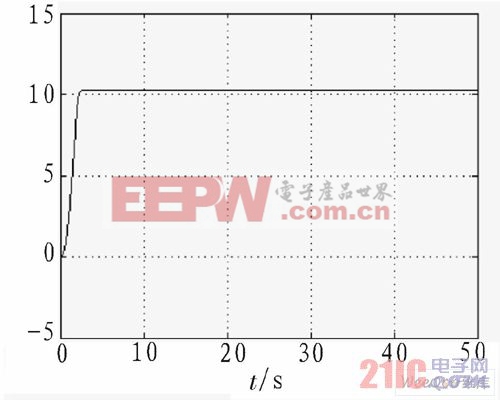
圖7 模糊-PI雙模控制器仿真結果
雙模系統穩定且消差的關鍵在Kp、Ki兩個參數的選擇上,A的主要作用是用來改善仿真曲線前端的形態,即調節超調量和上升時間的。從仿真結果可以看出,模糊-PI雙模控制系統的上升時間和最大超調量都有所減少,系統性能更好。
4 結束語
本文提出的模糊-PI雙模控制器,當系統偏差較大,采用模糊控制以獲得良好的動態性能;當系統偏差較小,采用PI控制以獲得較好的穩態性能。通過在Matlab/Simulink環境下的仿真研究,從仿真結果可以看出,與典型PI控制器相比,模糊-PI雙棋控制器能很好地解決前者上升時間長、超調量大缺點。模糊-Pl雙模控制系統在快速性、穩定性及準確性方面都有較大的改善。

pid控制器相關文章:pid控制器原理








評論