基于加速度回路的天線隨動系統控制器設計

摘要:為了解決天線隨動系統所存在的振顫現象和全數字化實現等問題,介紹了一種基于加速度回路的全數字化天線隨動系統控制器,該系統以DSP芯片TMS320F2812為核心控制芯片,采用速率陀螺平臺穩定系統、數字PID控制算法和脈寬調制驅動方式,通過引入加速度回路抑制系統的高頻振蕩,極大地改善了系統的穩定性和動態品質,具有極高的應用價值。
關鍵詞:加速度回路;天線隨動系統;平臺穩定系統;PID;脈寬調制
0 引言
隨動系統亦稱為伺服系統,其廣泛應用于衛星通信、自動駕駛儀、天線位置控制、導彈和飛船的制導等各個領域。在導彈制導領域中,隨動系統的應用極其重要,其涉及到目標準確跟蹤、制導精度、作戰性能等關鍵因素,隨動系統控制器作為整個導彈制導系統的核心,其性能好壞直接影響著系統的整體性能。
文獻提出導引頭隨動控制系統設計方案,通過理論分析和仿真驗證表明,這種隨動系統具有較好的搜索和跟蹤性能。但是,在實際應用中,由于高頻振蕩的存在,對隨動系統的高跟蹤精度和整體性能影響較大。針對這種問題,本文從天線隨動系統的控制方案出發,以實現隨動系統的快速動態響應特性、高質量的穩態精度和較強的非線性干擾能力為目的,通過仿真詳細分析了隨動系統的各種功能特性。巧用速度微分即加速度負反饋的方法,引入加速度反饋回路,增加系統阻尼,在減小超調的同時,抑制尖峰干擾,極大地提高了天線隨動系統的整體性能。
1 系統結構及工作原理
本系統設計采用內外雙框架結構,內框架為俯仰框架,外框架為方位框架。內外框架均安裝有直流力矩電機、測角電位計和速率陀螺,由它們共同實現天線的方位和俯仰運動。系統結構如圖1所示。
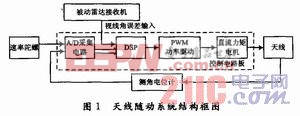
控制系統由測角電位計、速率陀螺、A/D電路、DSP控制器、PWM功率驅動電路、直流力矩電機構成。A/D電路將電位計和速率陀螺輸出的模擬信號轉換為數字信號,被動雷達接收機作為測角裝置給出誤差角度信號,在DSP控制器中完成PID控制算法,并給出PWM信號,再經PWM功率驅動電路驅動直流力矩電機,從而完成對天線的全數字化控制。
2 系統設計與仿真
2.1 系統控制原理框圖
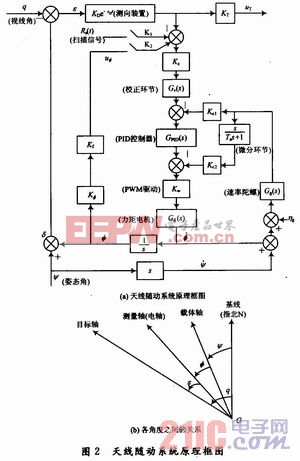
本系統所采用的是速率陀螺穩定平臺式天線隨動跟蹤系統方案,從原理上說,可稱為“平臺式隨動系統”,它既能隔離載體角運動對天線電軸的鉸鏈,又能使天線電軸快速準確地跟蹤視線,并且當被動雷達接收機停止工作時,天線電軸能保持在導航坐標系總的指向穩定不變。該方案的控制原理框圖以及各個角度之間的關系如圖2所示。












評論