基于ARM7的物流系統自動引導小車控制系統設計

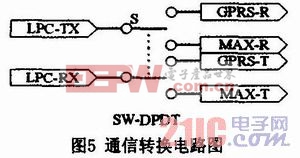
GPRS模塊串口工作方式的電平為TTL電平,所以GPRS模塊和控制核心處理器的連接可以是直接連接。但考慮到模塊的調試及程序的燒錄,所以在GPRS模塊與處理器連接處使用轉接開關。以此完成電腦到處理器的通信、GPRS模塊到電腦的通信。GPRS模塊、處理器、電腦的通信電路連接示意圖如圖5所示。本文引用地址:http://www.j9360.com/article/162173.htm
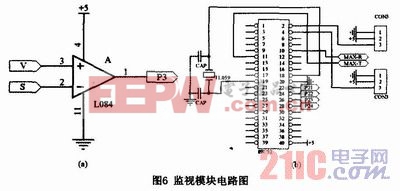
3 監視模塊
監視模塊采用的是普通高清視頻攝像頭,分辨率達1024×768。視頻采用PAL模式傳輸經處理器處理,通過無線互聯網把圖像傳輸到客戶端,其電路圖如圖6(a)所示。攝像頭的各方位由單片機驅動舵機來實現,舵機驅動電路如圖6(b)所示。
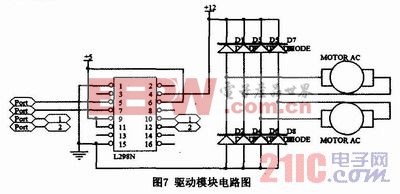
4 驅動模塊
驅動模塊采用的驅動芯片為L298N,該芯片功率大,電源可直接采用1 2V。單個芯片可以控制兩個直流電機,本文采用兩片L298N以實現AGV的各方位移動。電路如圖7所示。
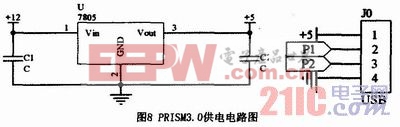
5 電源模塊
電源部分采用的是12V直流鋰電池,功率為10W。對各個模塊部分進行分別供電。穩壓管采用的是7805。由于GPRS對電源要求特別高,所以單獨采用一個LM2941S對其供電。
wf8000 WIFI模塊是華為公司生產的一種專門用于嵌入式系統的無線網絡模塊。模塊符合802.11b標準,芯片采用prism3.0。原理圖如圖8所示。
6 結論
利用本控制系統,可以實現AGV的遠程控制及工作環境實時監控。結合運輸機械裝置可以實現在特殊工作環境下的智能遠程控制搬運工作。在物流系統等一些環境較差的場所可以代替人的工作,實現更多的功能,為貨物搬運工作帶來便利。










評論