基于模糊控制的水下潛器沉浮控制方法

摘要:針對水下潛器實際工作的需求和水下沉浮運動特征,提出一種基于自適應模糊控制的水下潛器自主沉浮控制方法。該方法從優化隸屬函數入手,采用多層前向神經網絡的誤差反向傳播(EBP)算法對它的參數進行在線修正,并采用Delta-Bar-Delta學習規則對學習速率進行在線調整,使EBP算法具有較快的收斂速度,同時避免了局部極小值問題。仿真實驗表明,對于水下潛器自主沉浮運動的不能精確建摸、干擾嚴重的非線性與時變情況,這種自適應模糊控制是一種較好的控制方式。
關鍵詞:模糊控制;自主沉浮;隸屬函數;神經網絡
水下潛器在作業使用時,為了自身的結構安全以及保持深度穩定性,要求有良好的自主沉浮控制能力。水下潛器由于慣性較大,在水下的低速運動表現為耦合非線性。因此,水下潛器自主沉浮控制系統是一種慣性大、時滯、非線性的復雜控制系統。常規的PID控制方法。要求水下潛器的動力學特性是已知的,同時應該保持不變,尤其是外界的擾動要盡可能小,主要由人工憑經驗根據水下潛器的重量、排水、沉浮速度及海況等諸因素調整各參數。但實際情況中海洋環境的特殊性和多變性,使得常規的PID方法有很大的局限性,運用效果不好。模糊控制是一種適用于難以用精確數學模型描述而主要依賴人工經驗的復雜控制方法,因此人們紛紛研究將模糊控制應用到各種航器的操縱控制中。但一般的模糊控制器因屬于PD控制,缺少積分環節,并且其模糊規則一經確定就不再改變,在無干擾的情況下,可以獲得較好的控制效果,當環境條件發生變化時,控制效果就顯得不夠理想。
文中針對實際要求,提出一種基于自適應模糊控制的水下潛器自動沉浮控制方法。由于模糊控制器的隸屬函數與模糊控制規則的選取對控制效果影響最大,該方法從優化隸屬函數入手,采用多層前向神經網絡的誤差反向傳播(EBP)算法對它的參數進行在線修正,采用Delta-Bar-Delta學習規則對學習速率進行在線調整,使EBP算法具有較快的收斂速度,同時避免了局部極小值問題。仿真實驗表明,對于水下潛器自動沉浮與定深潛伏運動的不能精確建摸、干擾嚴重的非線性、時變情況,這種自適應模糊控制是一種較好的控制方式。
1 潛器水下自主沉浮控制系統工作原理
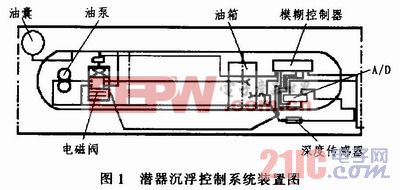
潛器沉浮控制系統裝置如圖1所示,主要由油箱、油泵、電磁閥、油囊及相關的電子控制器、傳感器,模糊轉換電路、電源組成。裝置浮力調節的控制原理是用油泵將油箱的油充到油囊中去,油囊膨脹,從而使反潛器排水體積增加,其浮力增加。反之,將油囊中的油抽回油箱中,則其浮力將減小。正負浮力的改變從而使反潛器上浮或下沉。
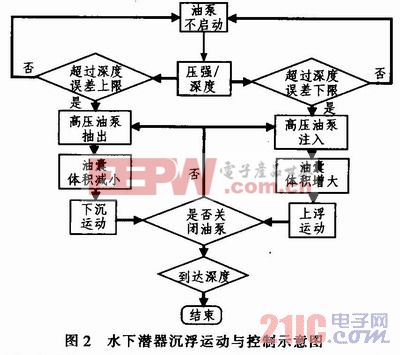
設想的潛器定深與沉浮運動的過程描述如圖2所示。所構想的初始技術指標為:定深誤差在定深指標的5%以內,即在2 000 m定深處上下沉浮不能超出100 m。這樣就要求高壓油泵的工作深度要達到2 100 m以上,并留出50~100 m的設計裕度。油囊高壓泵的抽放油速率設計以及油囊的大小,一方面根據要求的反潛器定深動作反應速率和油囊體積變化時滯來參考,另一方面這些性能參數也依賴于實驗精確測定,為油囊充放油控制提供參數。




















評論