基于nRF24L01的無線圖像傳感器節點設計實現

引言
無線傳感器網絡綜合了傳感器技術、嵌入式計算技術、現代網絡及無線通信技術、分布式信息處理技術等,能夠通過各類集成化的微型傳感器協作地實時監測、感知和采集各種環境或監測對象的信息,這些信息通過無線方式被發送,并以自組多跳的網絡方式傳送到用戶終端,從而實現物理世界、計算世界以及人類社會三元世界的連通 ,圖1所示為典型的無線傳感器網絡體系結構 。無線傳感器網絡應用前景廣闊,它在軍事國防 、災害監測 、智能樓宇等許多領域都有很大的實用價值,已引起國內外學術界和工業界的廣泛關注與重視。
實驗心理學家Treicher通過大量實驗證實:人類獲取信息83%來自視覺。因此控制工程網版權所有,發展無線圖像傳感器網絡技術,有很大的應用潛力,它為目標識別、安全監控等應用領域提供了一個很好的解決途徑和技術方案。目前圖像傳感器節點射頻部分傳輸速度都比較低(不超過250Kbps),如美國UCLA設計的Cyclops節點 等。這些節點成本高、功耗大、傳輸速度慢、實用性不太高。本文應用nRF24L01作為節點無線收發器,設計了一種實用性較強的圖像傳感器節點。該節點相比Telos、Mica2、MicaZ、Cyclops等節點具有傳輸快、功耗低等優點。
1、圖像傳感器節點設計
圖像信息數據量大,而傳統的無線傳感器網絡射頻收發器的傳輸速度一般都較低,無法滿足這種大數據量的數據傳輸。傳感器節點往往采用電池供電CONTROL ENGINEERING China版權所有,電源能量十分有限。因此控制工程網版權所有,在進行圖像傳感器節點設計時必須遵循以下原則:1)盡可能降低節點能量消耗以最大限度地延長節點壽命;2)較快的傳輸速度以滿足數據實時性;3)增加節點設計的靈活性使其能適合更多的應用場合。
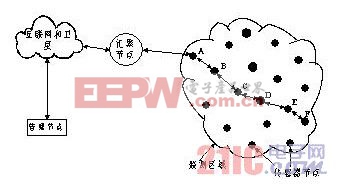
圖1 無線傳感器網絡體系結構
1.1 節點硬件設計
1.1.1 節點硬件架構
本文設計的圖像傳感器節點由五部分組成:微處理器模塊、圖像傳感器模塊、無線通信模塊、數據存儲模塊和電源模塊。圖2所示是無線圖像傳感器節點總體架構示意圖。
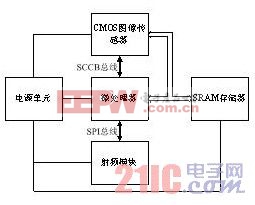
圖2 圖像傳感器節點總體架構圖
該節點中微處理器是系統的控制中心,其功能是控制與調度其他器件的工作狀態與進程,以實現圖像采集、存儲和無線組網傳輸等功能。射頻模塊是節點的無線通信單元,通過SPI總線與微處理器進行通信,實現節點與無線傳感器網絡中其他節點的通信以及數據傳輸等功能。微處理器、圖像傳感器和SRAM的數據總線是共用的,這樣可方便圖像數據在微處理器、圖像傳感器和SRAM之間傳輸,但同時也要求微處理器對圖像傳感器和SRAM的操作時序進行嚴格控制,以避免數據總線操作沖突。












評論